华北电网有限公司科技项目可行性研究报告项目名称:输电线路智能巡线机器人申请单位:起止时间:年月 至年月项目负责人:通信地址:邮政编码:联系电话:传真:申请日期:年月一、 目的和意义电能传输必须依靠高压输电线路
由于输电线路分布点多面广,所处地形复杂,自然环境恶劣,电力线及杆塔附件长期暴露在野外,因受到持续的机械张力、电气闪络、材料老化的影响而产生断股、磨损、腐蚀等损伤,必须及时修复或更换
所以,必须对输电线路进行定期巡视检查,随时掌握和了解输电线路的运行情况,线路周围环境和线路保护区的变化情况,以便及时发现和消除隐患,预防事故的发生,确保供电安全
传统的人工巡检方法不仅工作量大而且条件艰苦,特别是对山区和跨越大江大河的输电线路的巡检,存在很大的困难,甚至有一些巡检项目靠常规方法难以完成,因此,利用机器人进行自动巡线成为保障线路安全运行的一种必要手段
国内外目前见诸报道的输电线路机器人,都是功能单一型机器人,要么只能巡线,要么只能除冰
本方案提出一种以轻量级机器人底盘技术为基础,通过添加模块化功能单元进行功能 /性能扩充的机器人设计思路,不仅可实现目前输电线路巡线、除冰的需求,而且系统具备极强的可升级性,适应智能电网未来新需求
二、 国内外研究水平综述国外对高压输电线路巡检机器人的研究始于上世纪80 年代,由日本、美国、加拿大等发达国家先后展开了对高压输电线路巡检机器人的研究
从国内外巡检机器人的发展来看,用于巡检机器人的行走机构主要有步进式行走机构和轮式行走机构
步进式行走机构通过多只手臂的交替移动完成在线爬行,行走移动为间断式,其移动速度缓慢,效率低
轮式行走机构依靠由电机驱动的行走轮与线路之间的摩擦,驱动机器人前进
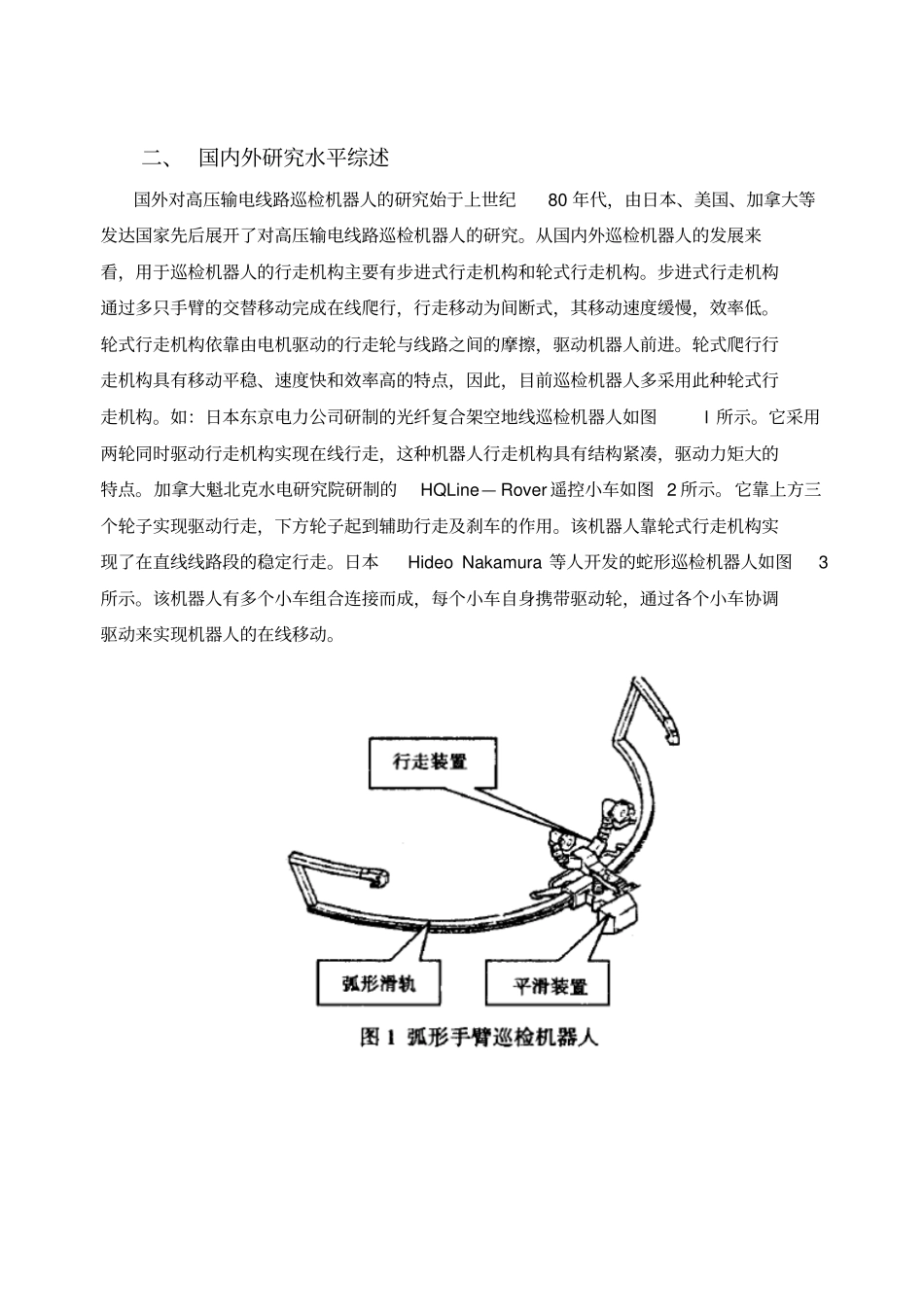
轮式爬行行走机构具有移动平稳、速度快和效率高的特点,因此,目前巡检机器人多采用此种轮式行走机构
如:日本东京电力公司研制的光纤复合架空地线巡检机器人如图l