精品文档---下载后可任意编辑一、引言 捷联惯性导航介绍惯性导航系统在进入导航之前,首先必须完成初始对准过程,对于平台式惯导系统,初始对准的主要目的是通过控制实体平台,实现与导航坐标系的轴线重合;对于捷联惯导系统,则是通过解算确定载体与导航坐标系的姿态关系矩阵
无论何种系统,对准精度和对准时间均是评价初始对准的两项重要技术指标
对准时间的长短标志着系统进入工作状态的反应能力,对准精度的高低影响不仅在姿态上,还表现在速度和位置等信息上,反映系统后续导航性能
对准过程中,载车所处环境是影响对准精度和对准速度的一个重要因素
当载车处在对地静止、外界无干扰的较好环境中,普通的解析对准法就能够达到较高对准精度
但当载车受阵风扰动、发动机振动等外界干扰,处在较为恶劣环境时,惯性器件的随机噪声会增大,在随机噪声很高的情况下,完成初始对准需要较长时间,且对准精度也会受到较大影响
二、基座晃动对器件信号的影响实际对准环境中,由于外界干扰对基座产生晃动,导致惯性敏感器件测量输出信号中除了含有地球自转角速度重量外,还包含着载体晃动等角速度信息,使得信号信噪比降低,影响对准精度和对准时间
通常导致基座扰动的主要原因有:车体发动机开动时的振动及变速时的变频振动、人员和阵风扰动、车体下方软地的下陷以及过往车辆引起的微幅晃动等
其中,载车发动机引起的振动属于高频信号,该干扰信号通常可以认为是周期性信号或近似平稳的随机信号,常规滤波具有一定效果,工程实践中,可通过分析器件输出信号的频谱,设计参数合理的低通滤波器将其滤除
人员活动、上下车以及开关门等扰动同属于低频干扰,可认为是包含冲击信号或非平稳随机干扰等非周期性信号,对于此类干扰,通常滤波难以取得令人满意效果
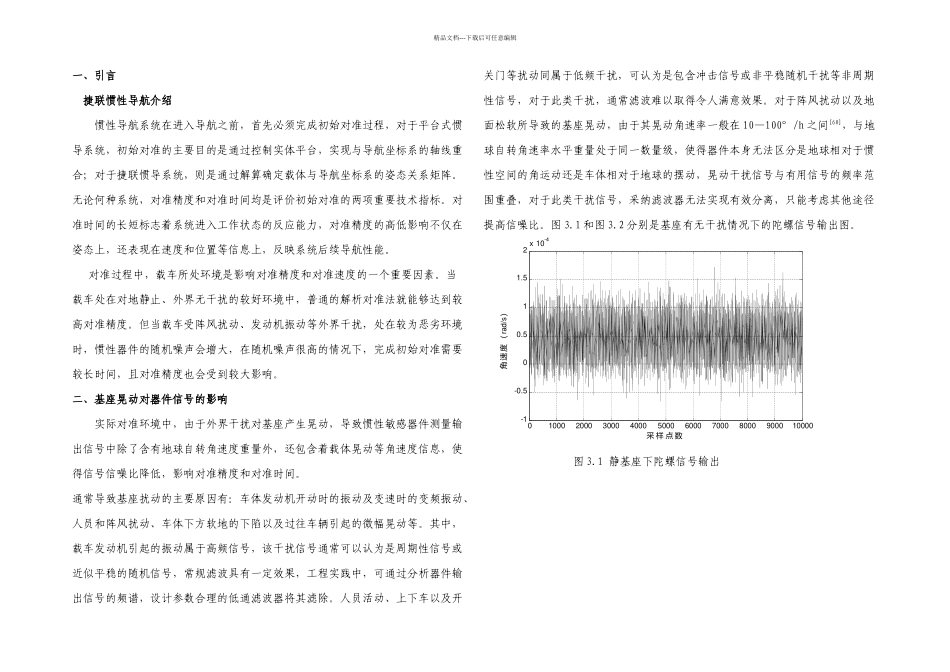
对于阵风扰动以及地面松软所导致的基座晃动,由于其晃动角速率一般在 10—100°/h 之间[60],与地球自转角速率水平重量处于同一数量级,使得器