汽轮机旁路系统控制第十二章 锅炉给水泵汽轮机 BFPT 控制系统 淮北二厂的锅炉给水泵汽轮机 BFPT 由西屋公司的 BFPT 控制系统(又称 MEH系统),控制运行
小汽轮机的汽源有两路,一路为低压汽,来自四级抽汽,正常运行时,它是主要汽源;另一路来自新蒸汽,若由于某种原因,例如负荷较低,四抽蒸汽压力较低时,导致低压汽源不好用或不够用时,可以利用新蒸汽,供小汽轮机
BFPT 控制器的任务就是控制小汽轮机的低压进汽调门以及高压进汽调门的开度,继而将小汽轮机的转速控制在希望的值上(目标值)
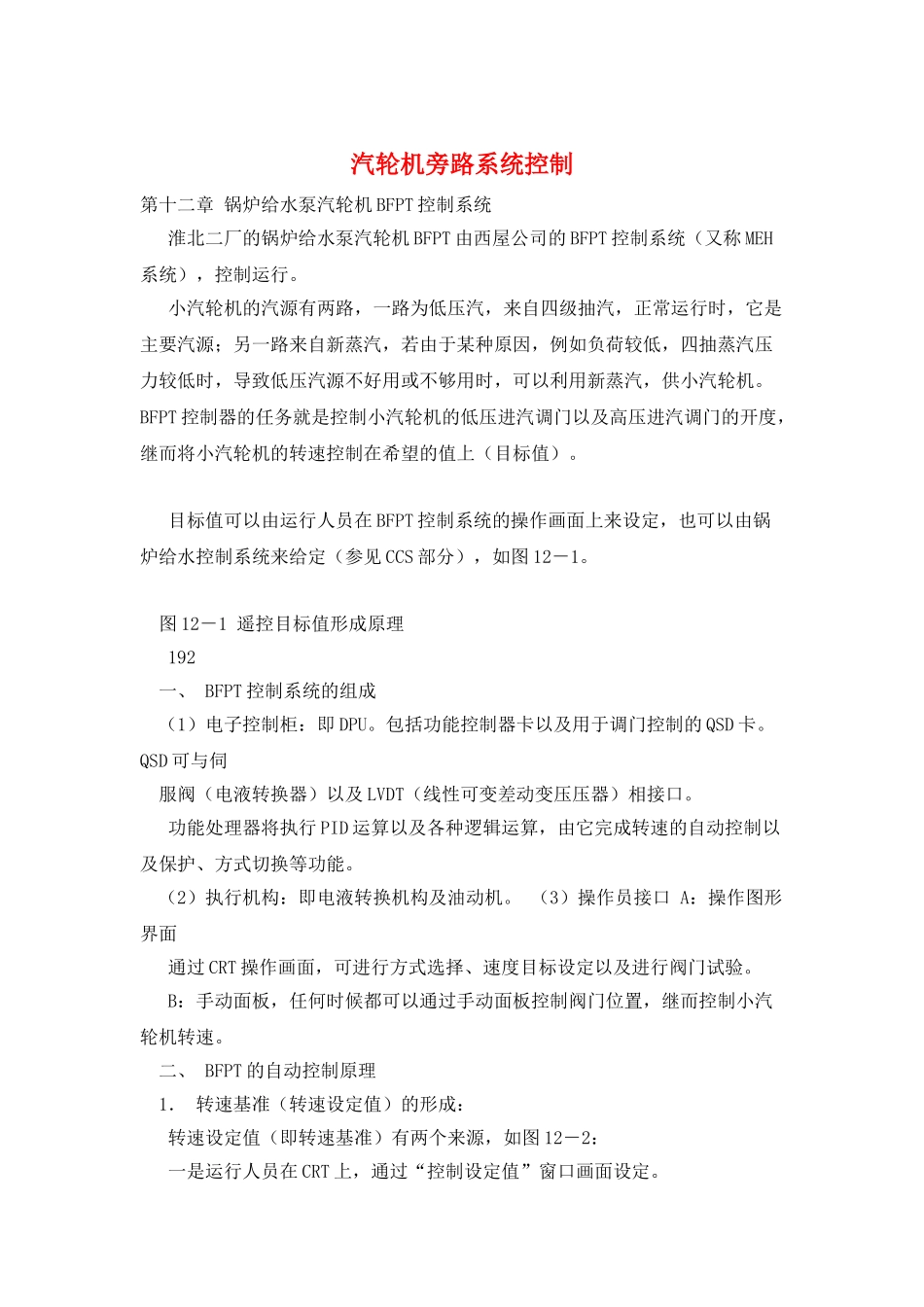
目标值可以由运行人员在 BFPT 控制系统的操作画面上来设定,也可以由锅炉给水控制系统来给定(参见 CCS 部分),如图 12-1
图 12-1 遥控目标值形成原理 192 一、 BFPT 控制系统的组成 (1)电子控制柜:即 DPU
包括功能控制器卡以及用于调门控制的 QSD 卡
QSD 可与伺 服阀(电液转换器)以及 LVDT(线性可变差动变压压器)相接口
功能处理器将执行 PID 运算以及各种逻辑运算,由它完成转速的自动控制以及保护、方式切换等功能
(2)执行机构:即电液转换机构及油动机
(3)操作员接口 A:操作图形界面 通过 CRT 操作画面,可进行方式选择、速度目标设定以及进行阀门试验
B:手动面板,任何时候都可以通过手动面板控制阀门位置,继而控制小汽轮机转速
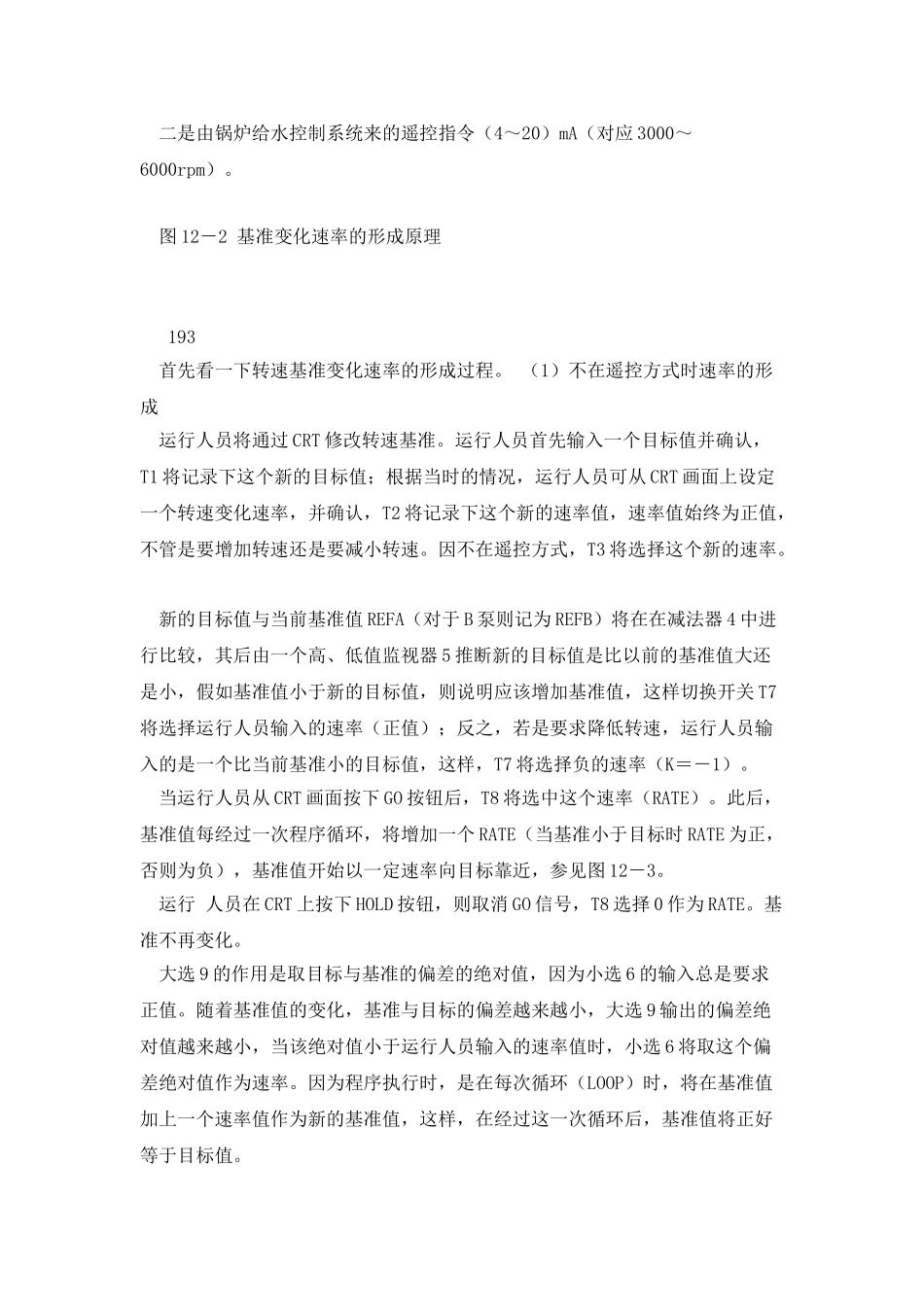
二、 BFPT 的自动控制原理 1. 转速基准(转速设定值)的形成: 转速设定值(即转速基准)有两个来源,如图 12-2: 一是运行人员在 CRT 上,通过“控制设定值”窗口画面设定
二是由锅炉给水控制系统来的遥控指令(4~20)mA(对应 3000~6000rpm)
图 12-2 基准变化速率的形成原理 193 首先看一下转速基准变化速率的形成过程
(1)不在遥控方式时速率的形成 运行人员将通过