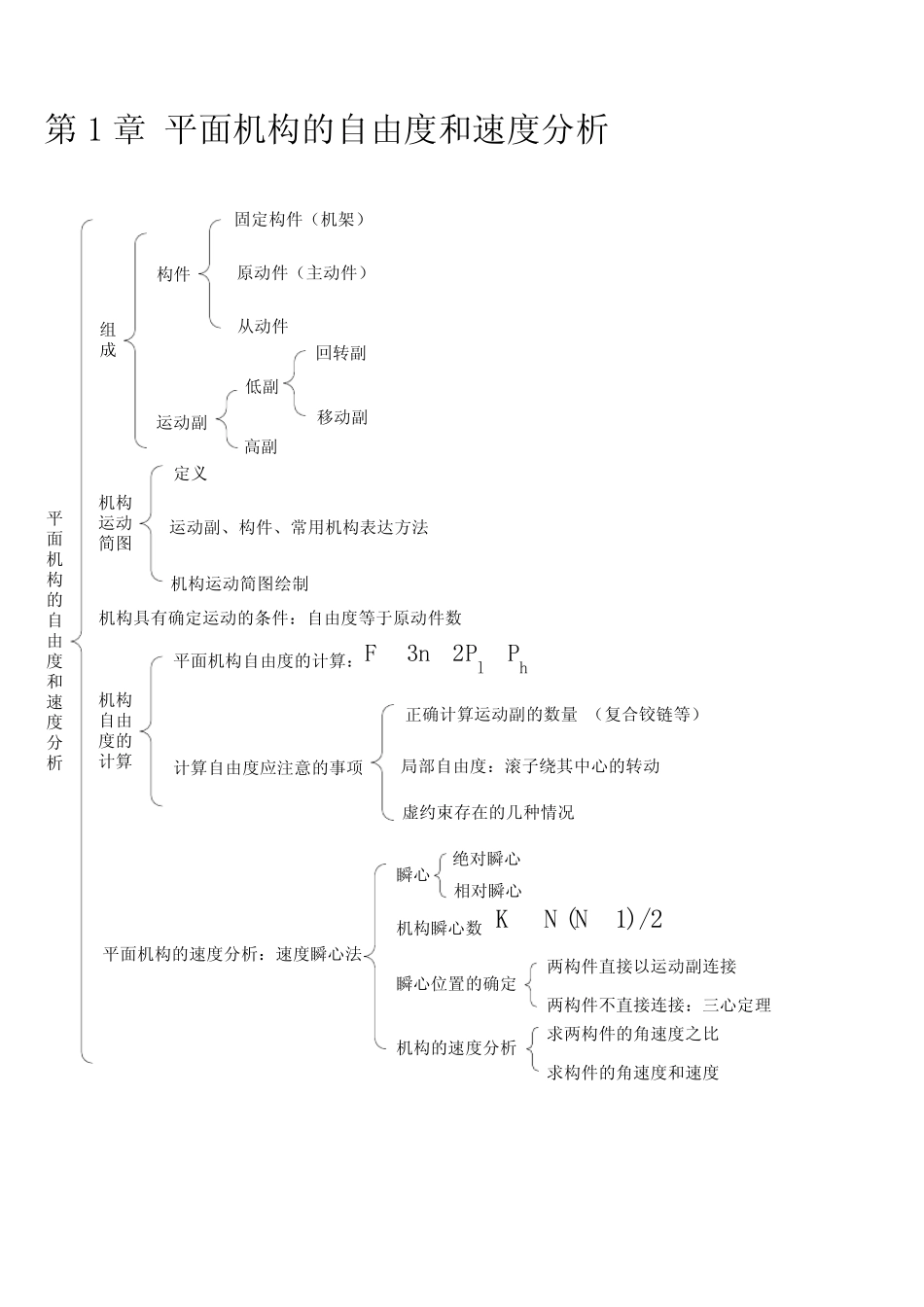
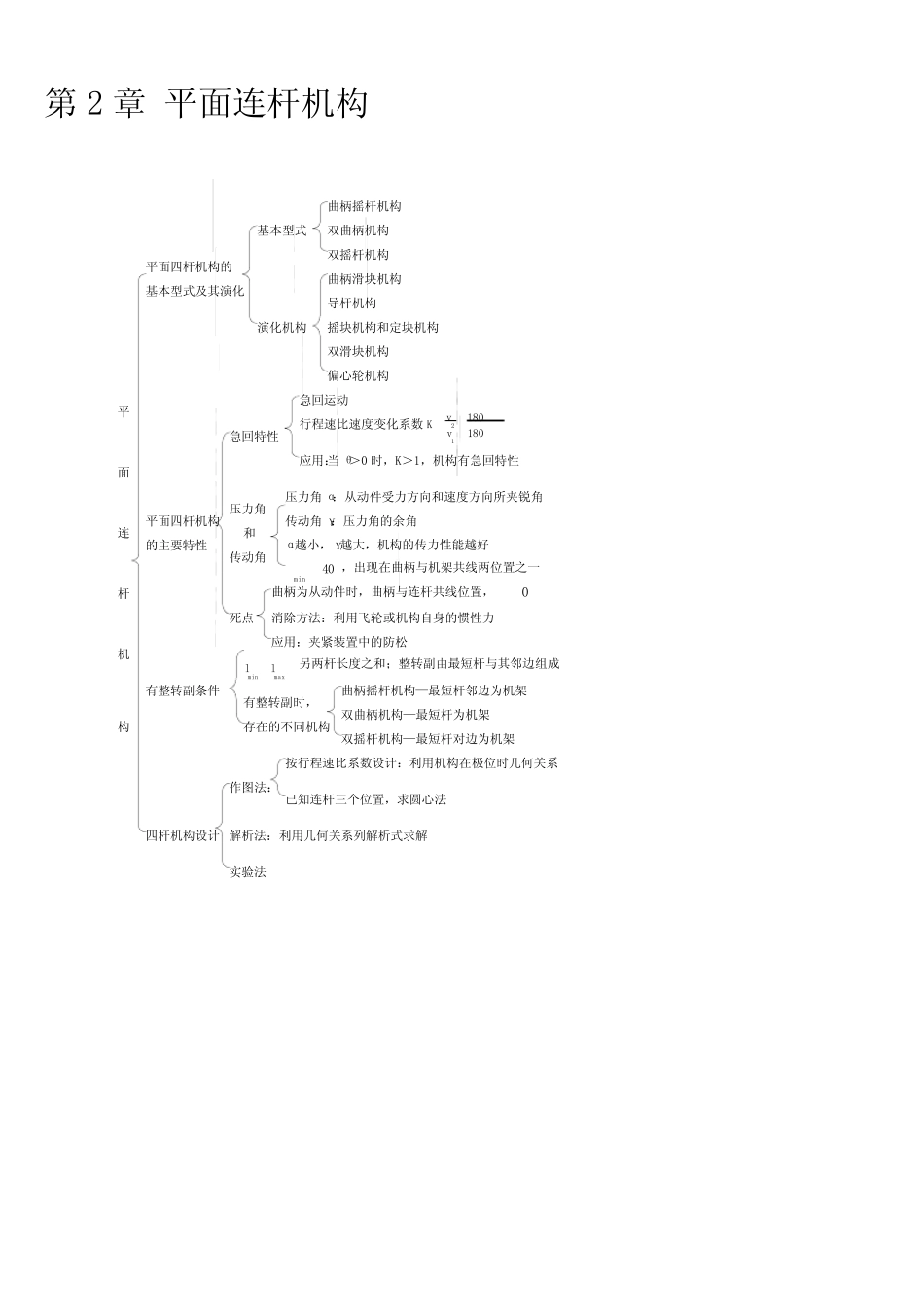
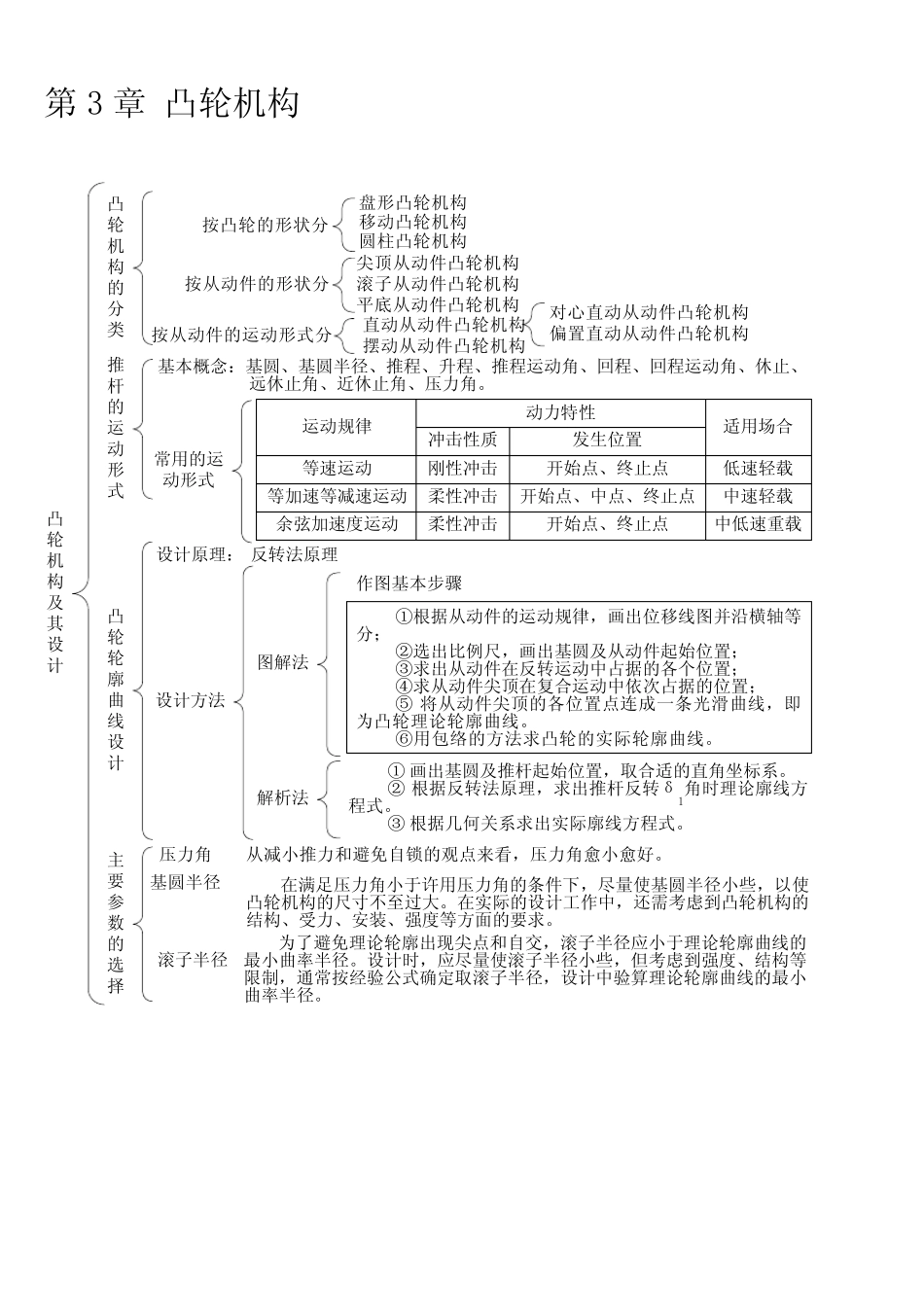
第1章平面机构的自由度和速度分析平面机构的自由度和速度分析组成机构自由度的计算构件运动副机构运动简图运动副、构件、常用机构表达方法定义平面机构自由度的计算:机构具有确定运动的条件:自由度等于原动件数固定构件(机架)低副从动件原动件(主动件)高副移动副回转副机构运动简图绘制hlPPnF23计算自由度应注意的事项局部自由度:滚子绕其中心的转动正确计算运动副的数量(复合铰链等)虚约束存在的几种情况平面机构的速度分析:速度瞬心法瞬心机构瞬心数瞬心位置的确定机构的速度分析相对瞬心绝对瞬心2/)1(NNK两构件不直接连接:三心定理两构件直接以运动副连接求构件的角速度和速度求两构件的角速度之比第2章平面连杆机构曲柄摇杆机构曲柄滑块机构演化机构杆机平面四杆机构的基本型式按行程速比系数设计:利用机构在极位时几何关系已知连杆三个位置,求圆心法应用:夹紧装置中的防松构连面平基本型式及其演化双曲柄机构双摇杆机构导杆机构摇块机构和定块机构双滑块机构偏心轮机构平面四杆机构的主要特性急回特性急回运动行程速比速度变化系数18018012vvK应用:当θ>0时,K>1,机构有急回特性压力角压力角α:从动件受力方向和速度方向所夹锐角传动角γ:压力角的余角传动角α越小,γ越大,机构的传力性能越好40min,出现在曲柄与机架共线两位置之一和死点曲柄为从动件时,曲柄与连杆共线位置,0消除方法:利用飞轮或机构自身的惯性力有整转副条件maxminll另两杆长度之和;整转副由最短杆与其邻边组成有整转副时,曲柄摇杆机构—最短杆邻边为机架双曲柄机构—最短杆为机架双摇杆机构—最短杆对边为机架存在的不同机构四杆机构设计作图法:解析法:利用几何关系列解析式求解实验法第3章凸轮机构凸轮机构的分类凸轮机构及其设计推杆的运动形式基本概念:基圆、基圆半径、推程、升程、推程运动角、回程、回程运动角、