1第4章控制系统数学模型控制系统常用的数学模型有:控制系统常用的数学模型有:传递函数模型传递函数模型、、状态方程模型状态方程模型、、零极点增益模型零极点增益模型等
这些模型之间可以相互转换
这些模型之间可以相互转换
本章主要介绍如何利用本章主要介绍如何利用MATLAB/SimulinkMATLAB/Simulink建模和建模和对模型进行转换
对模型进行转换
5MATLAB/Simulink在模型中的应用4
1与多项式相关的函数MATLAB中多项式用行向量表示,行向量元素为按降幂排列的多项式系数
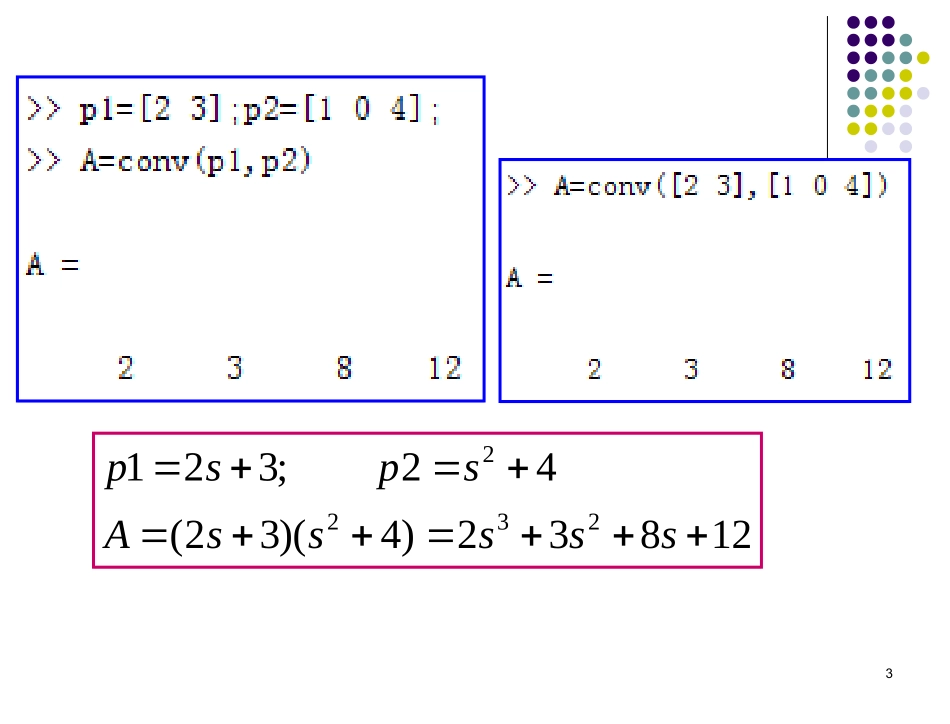
1.多项式乘法函数conv()格式:C=conv(A,B)%求多项式A和B的乘积A、B是两个多项式的系数向量,按降幂排列
conv()把两个多项式相乘合并成一个多项式
312832)4)(32(42;3212322sssssAspsp4注意:一个conv只能用于两个多项式的运算
如果有多个多项式,则要用多个conv
用多个conv嵌套使用,记得加括号
7585324)52)(52)(3(23ssssssB52.多项式求根函数roots()格式为:r=roots(p)其中,p为多项式,r为所求的根
可对传递函数分子和分母求根,求出系统的零极点
232ssA63.由根创建多项式函数poly()已知多项式的特征根r,用函数poly()求出多项式系数向量p
格式为:p=poly(r)232ssp7传递函数模型0111011
)()()(1asasasabsbsbsbsXsXsGnnnnmmmmio对线性定常系统,s的系数均为常数,且a0不等于0
MATLAB中,传递函数由分子多项式系数向量num和分母多项式系数向量den构成
num=[bm,bm-1,…,b0],den=[an,an-1,…