一、CAN-BUS介绍1.CAN的基本概念、特点CAN是ControllerAreaNetwork的缩写(以下称为CAN),是ISO*1国际标准化的串行通信协议
CAN协议如表3所示涵盖了ISO规定的OSI基本参照模型中的传输层、数据链路层及物理层
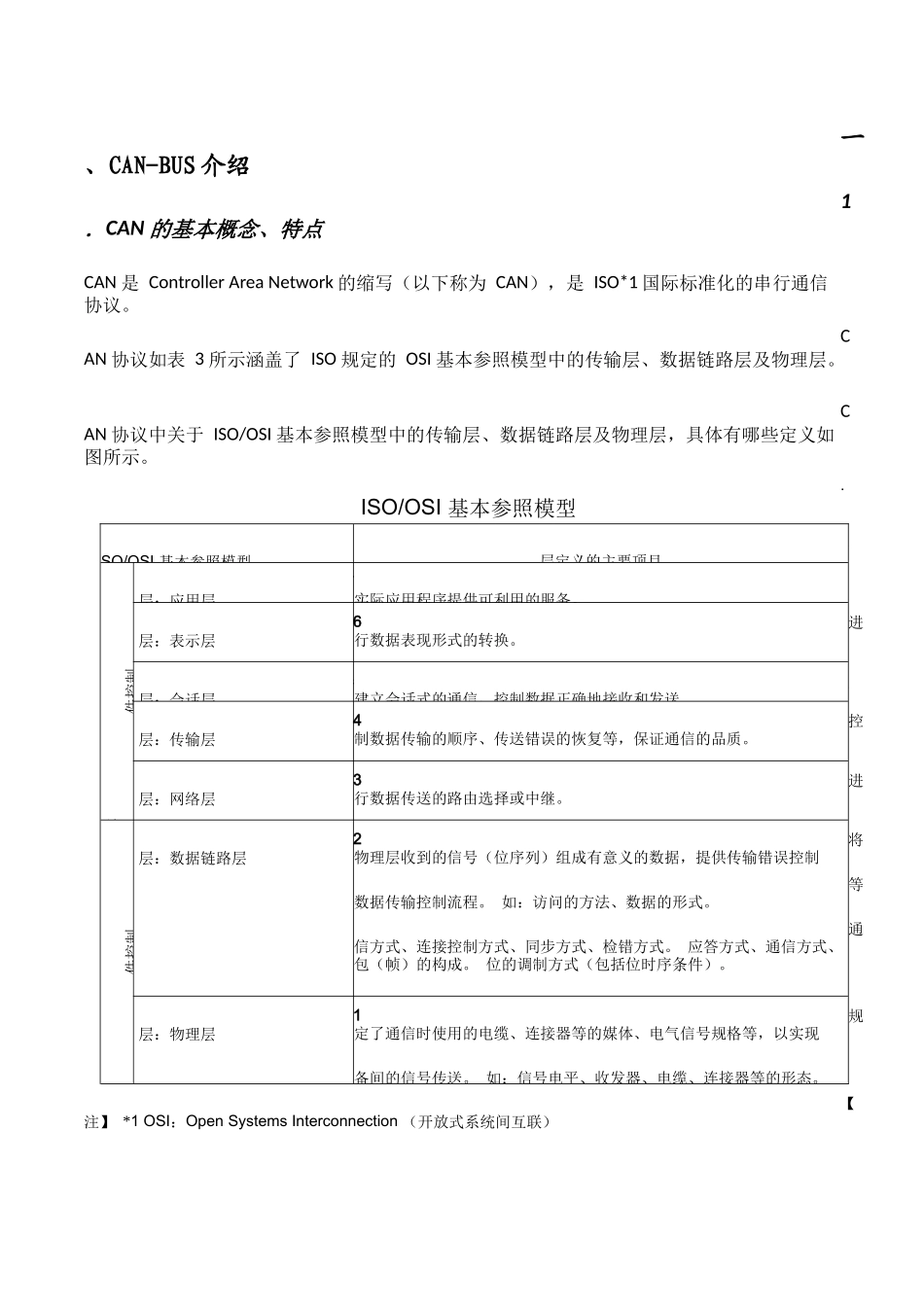
CAN协议中关于ISO/OSI基本参照模型中的传输层、数据链路层及物理层,具体有哪些定义如图所示
ISO/OSI基本参照模型ISO/OSI基本参照模型各层定义的主要项目软件控制7层:应用层由实际应用程序提供可利用的服务
6层:表示层进行数据表现形式的转换
如5层:会话层为建立会话式的通信,控制数据正确地接收和发送
4层:传输层控制数据传输的顺序、传送错误的恢复等,保证通信的品质
如3层:网络层进行数据传送的路由选择或中继
如硬件控制2层:数据链路层将物理层收到的信号(位序列)组成有意义的数据,提供传输错误控制等数据传输控制流程
如:访问的方法、数据的形式
通信方式、连接控制方式、同步方式、检错方式
应答方式、通信方式、包(帧)的构成
位的调制方式(包括位时序条件)
1层:物理层规定了通信时使用的电缆、连接器等的媒体、电气信号规格等,以实现设备间的信号传送
如:信号电平、收发器、电缆、连接器等的形态
【注】*1OSI:OpenSystemsInterconnection(开放式系统间互联)CAN的特点CAN协议具有以下特点
(1)多主控制在总线空闲时,所有的单元都可开始发送消息(多主控制)
最先访问总线的单元可获得发送权
(2)消息的发送在CAN协议中,所有的消息都以固定的格式发送
总线空闲时,所有与总线相连的单元都可以开始发送新消息
两个以上的单元同时开始发送消息时,根据标识符(Identifier以下称为ID)决定优先级
ID并不是表示发送的目的地址,而是表示访问总线的消息的优先级
两个以上的单元同时开始发送消息时,对各消息