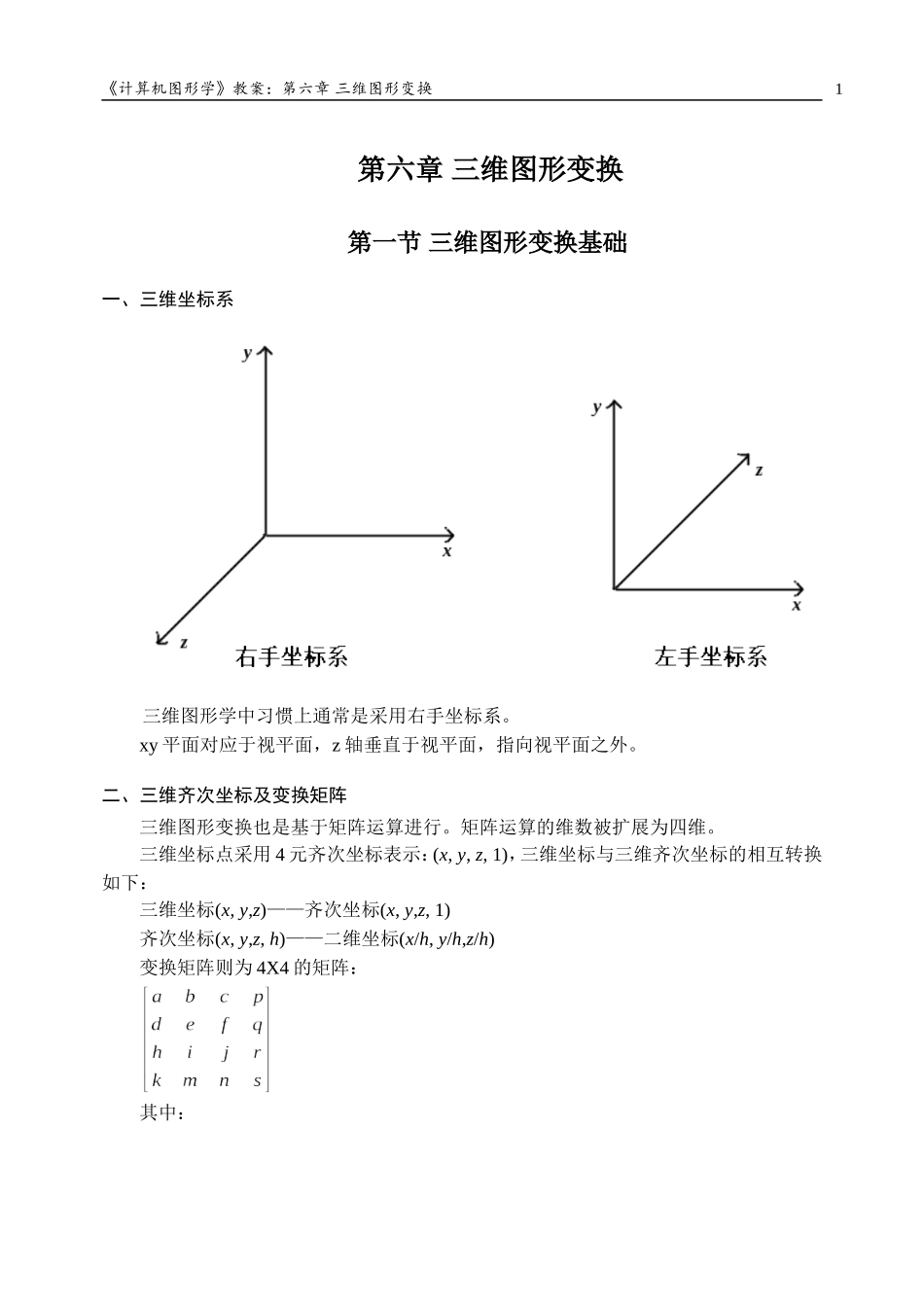
《计算机图形学》教案:第六章三维图形变换1第六章三维图形变换第一节三维图形变换基础一、三维坐标系三维图形学中习惯上通常是采用右手坐标系
xy平面对应于视平面,z轴垂直于视平面,指向视平面之外
二、三维齐次坐标及变换矩阵三维图形变换也是基于矩阵运算进行
矩阵运算的维数被扩展为四维
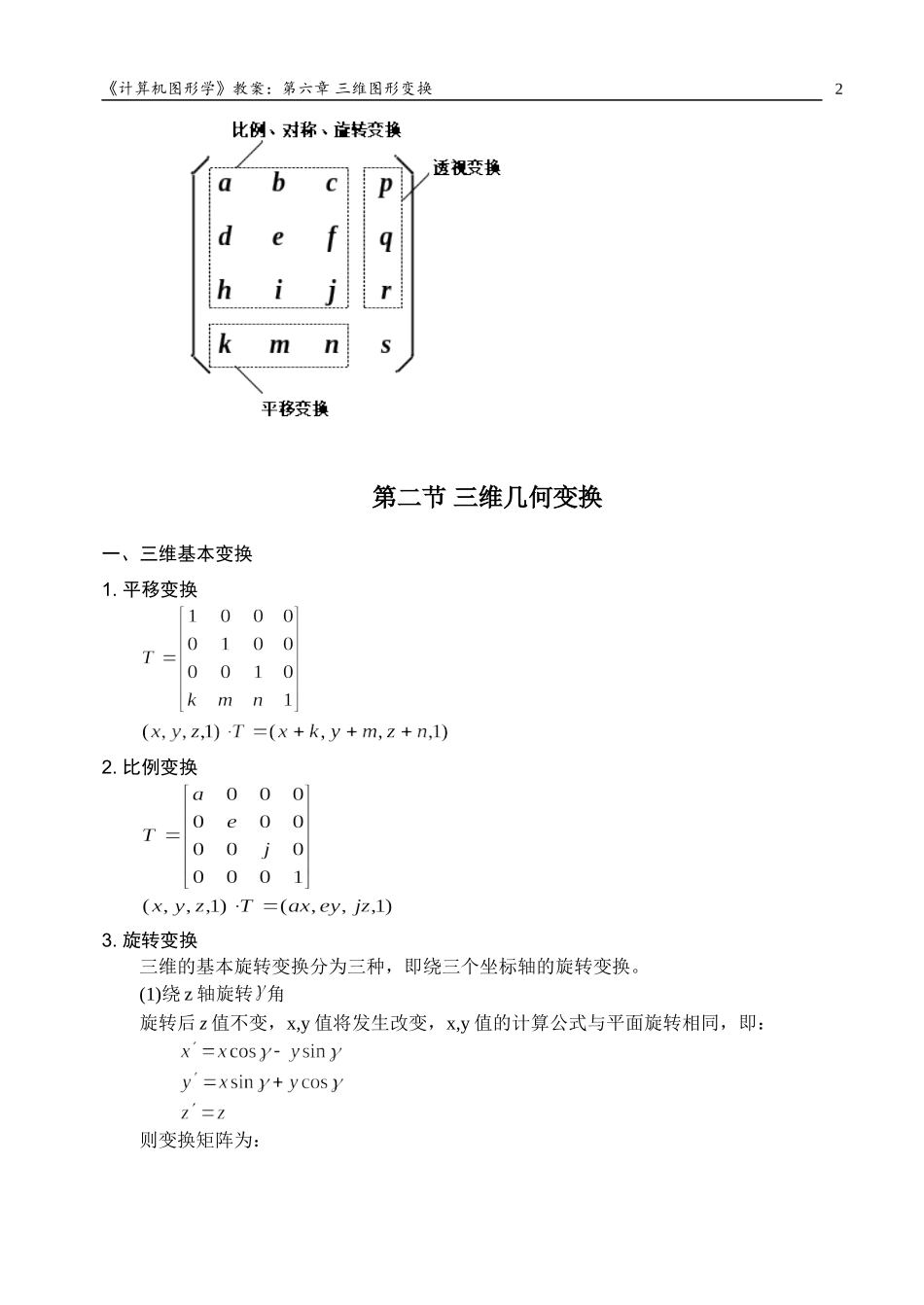
三维坐标点采用4元齐次坐标表示:(x,y,z,1),三维坐标与三维齐次坐标的相互转换如下:三维坐标(x,y,z)——齐次坐标(x,y,z,1)齐次坐标(x,y,z,h)——二维坐标(x/h,y/h,z/h)变换矩阵则为4X4的矩阵:其中:《计算机图形学》教案:第六章三维图形变换2第二节三维几何变换一、三维基本变换1
旋转变换三维的基本旋转变换分为三种,即绕三个坐标轴的旋转变换
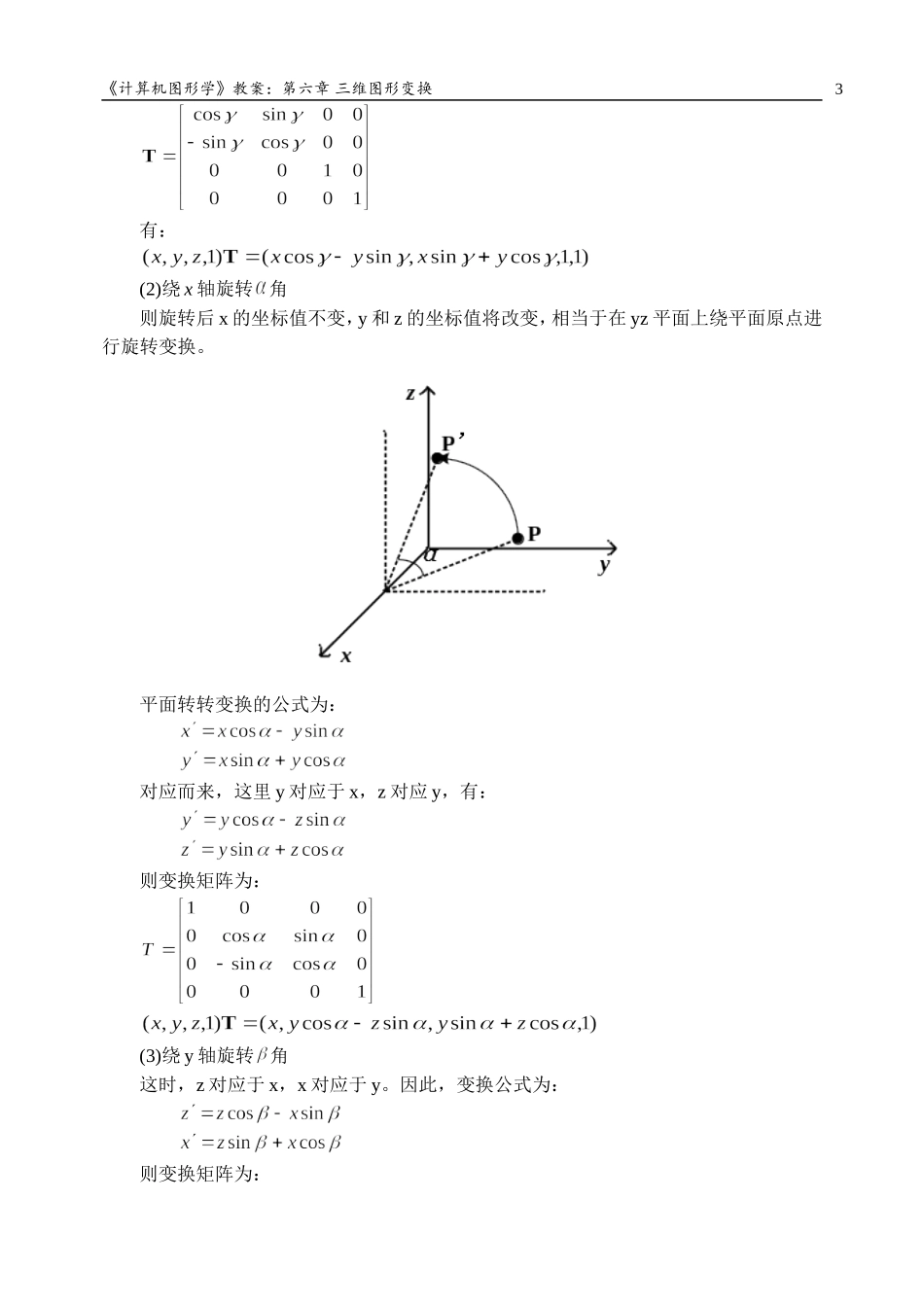
(1)绕z轴旋转角旋转后z值不变,x,y值将发生改变,x,y值的计算公式与平面旋转相同,即:则变换矩阵为:《计算机图形学》教案:第六章三维图形变换3有:(2)绕x轴旋转角则旋转后x的坐标值不变,y和z的坐标值将改变,相当于在yz平面上绕平面原点进行旋转变换
平面转转变换的公式为:对应而来,这里y对应于x,z对应y,有:则变换矩阵为:(3)绕y轴旋转角这时,z对应于x,x对应于y
因此,变换公式为:则变换矩阵为:《计算机图形学》教案:第六章三维图形变换4有:4
对称变换三维对称变换包括三种情况:对原点,对坐标轴,对坐标平面的对称变换
(1)对原点的对称变换变换后三个坐标值均取反
(2)对x轴的对称变换x坐标值保持不变,y,z值取反
类似可得对y,z轴的对称变换矩阵
(3)对xy平面的对称变换x,y值不变,z值取反
类似可得对xz平面,yz平面的对称变换矩阵
二、三维组合变换组合变换也对应于一个矩阵
组合变换的矩阵由其所包含的各基本变换的矩阵依次相乘得到
绕任意轴的旋转变换:旋转中心轴为A(xA,yA,zA