人工智能实验报告 实验名称:模糊方法实现电热箱的闭环控制实验 模糊逻辑控制(Fuzzy Logic Control)简称模糊控制(Fuzzy Control),是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制技术
1965 年,美国的L
Zadeh创立了模糊集合论;1973 年他给出了模糊逻辑控制的定义和相关的定理
1974 年,英国的E
Mamdani 首先用模糊控制语句组成模糊控制器,并把它应用于锅炉和蒸汽机的控制,在实验室获得成功
这一开拓性的工作标志着模糊控制论的诞生
模糊控制实质上是一种非线性控制,从属于智能控制的范畴
模糊控制的一大特点是既具有系统化的理论,又有着大量实际应用背景
模糊控制的发展最初在西方遇到了较大的阻力;然而在东方尤其是在日本,却得到了迅速而广泛的推广应用
近 20 多年来,模糊控制不论从理论上还是技术上都有了长足的进步,成为自动控制领域中一个非常活跃而又硕果累累的分支
其典型应用的例子涉及生产和生活的许多方面,例如在家用电器设备中有模糊洗衣机、空调、微波炉、吸尘器、照相机和摄录机等;在工业控制领域中有水净化处理、发酵过程、化学反应釜、水泥窑炉等的模糊控制;在专用系统和其它方面有地铁靠站停车、汽车驾驶、电梯、自动扶梯、蒸汽引擎以及机器人的模糊控制等
模糊控制是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的微机数字控制
它能模拟人的思维,构成一种非线性控制,以满足复杂的、不确定的过程控制的需要,是一种典型的智能控制
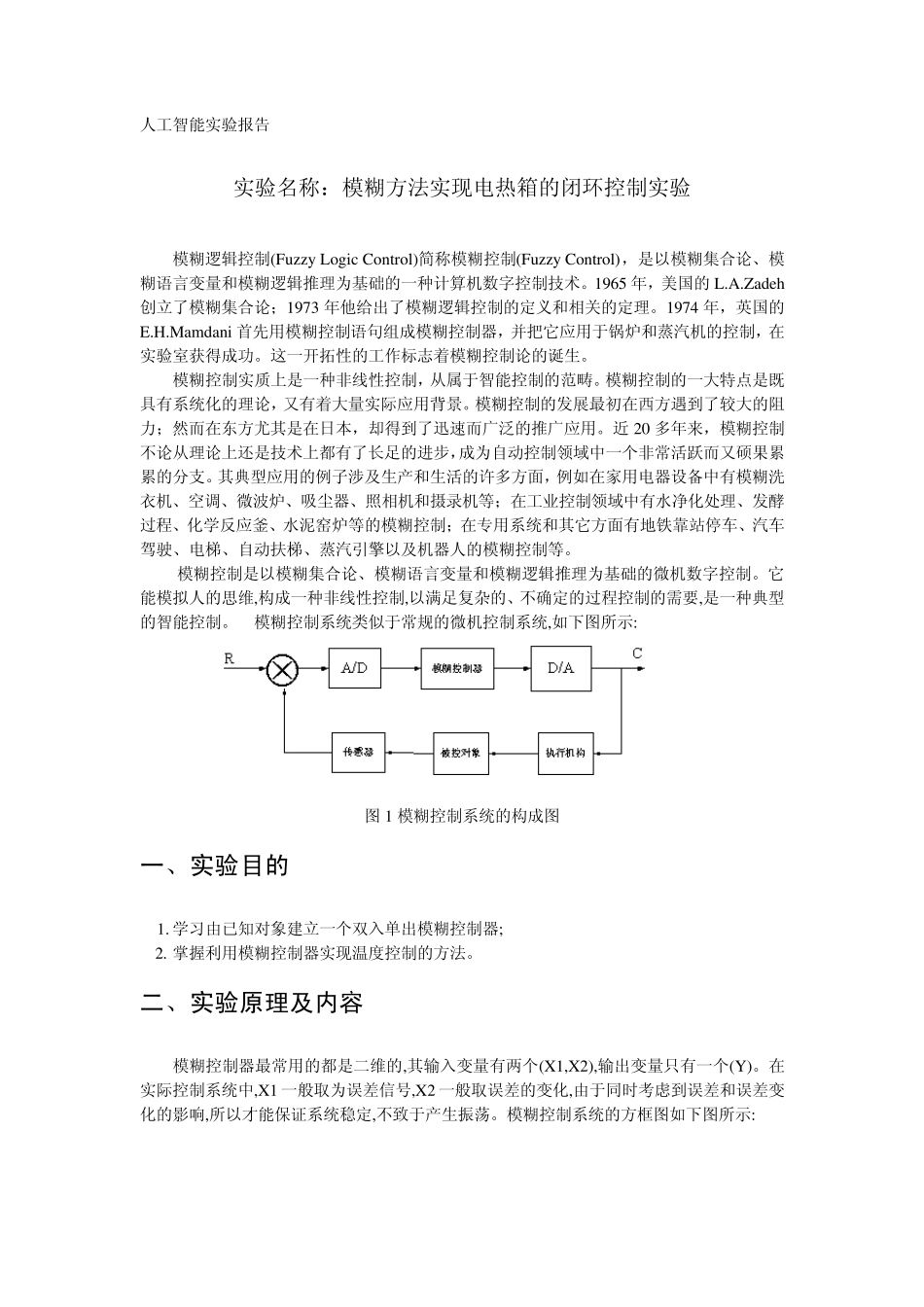
模糊控制系统类似于常规的微机控制系统,如下图所示: 图 1 模糊控制系统的构成图 一、实验目的 1
学习由已知对象建立一个双入单出模糊控制器; 2
掌握利用模糊控制器实现温度控制的方法
二、实验原理及内容 模糊控制器最常用的都是二维的,其输入变量有两个(X1,X2),输出变量只有一个(Y)