1KUKA机器人DEVICENET网络配置指南专业
2第一部分:安装软件1、安装KUKA机器人WorkVisual软件先安装setup
exe(Setup是安装WorkVisual软件的运行环境,如果电脑安装了相应的软件就不需要再安装)
再安装WorkVisualSetup
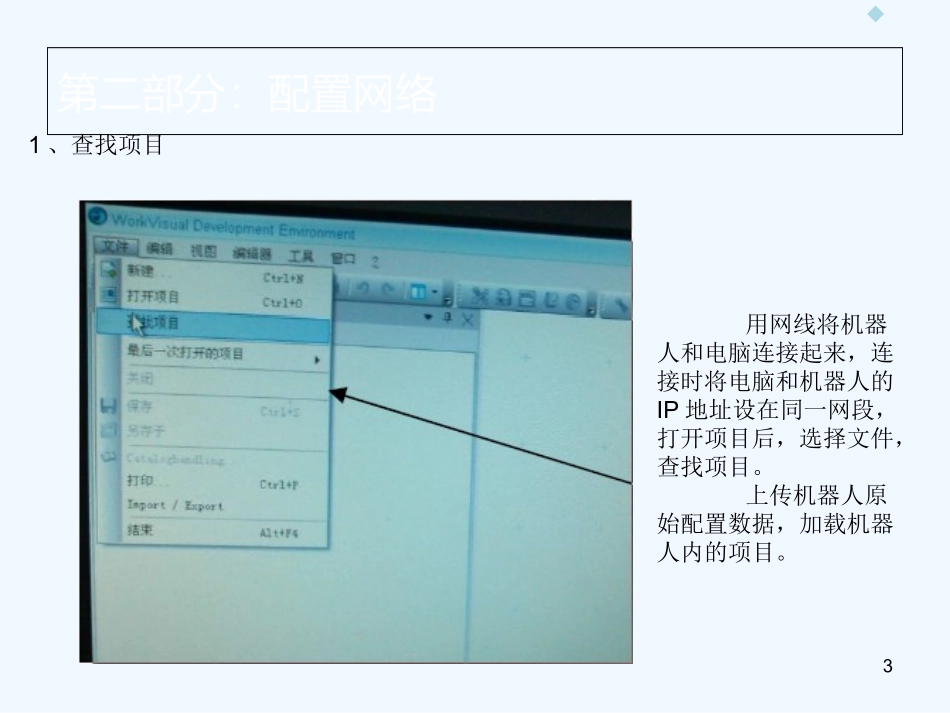
3第二部分:配置网络1、查找项目用网线将机器人和电脑连接起来,连接时将电脑和机器人的IP地址设在同一网段,打开项目后,选择文件,查找项目
上传机器人原始配置数据,加载机器人内的项目
4第二部分:配置网络1、查找项目箭头所指是我们查找的项目,选中后点击右下角打开按钮
5第二部分:配置网络2、激活项目此图为打开后的画面
为机器人里面的项目
双击Steuerung激活该项目
6第二部分:配置网络3、新建外部网络选中“总线结构”,右击添加总线的类型
7第二部分:配置网络4、添加网络类型右击添加我们现场的模块的型号网络类型有CP5614卡或者倍福模块专业
8第二部分:配置网络5、添加主站模块右击添加主站模块,选中现场的模块类型,双击即可添加到总线结构里面
9第二部分:配置网络6、更改主站模块的信息选择双击或者右击设置主站模块的信息专业
10第二部分:配置网络6、更改主站模块的信息此页不做任何更改专业
11第二部分:配置网络6、更改主站模块的信息主站模块的地址波特率专业
12第二部分:配置网络6、更改主站模块的信息此页不做任何更改专业
13第二部分:配置网络7、添加主站下面的从站模块选择双击或者右击,在出来的对话框中添加博士焊机的信号(机器人做主站从站的I\O信号)专业
14第二部分:配置网络7、更改主站下面的从站模块信息www
dgt-factory
com选择双击或