PID( Proportional Integral Deriv ativ e )控制是最早发展起来的控制策略之一,由于其算法简单、鲁棒性(稳定性)好和可靠性高,被广泛应用于工业过程控制,尤其适用于可建立精确数学模型的确定性控制系统
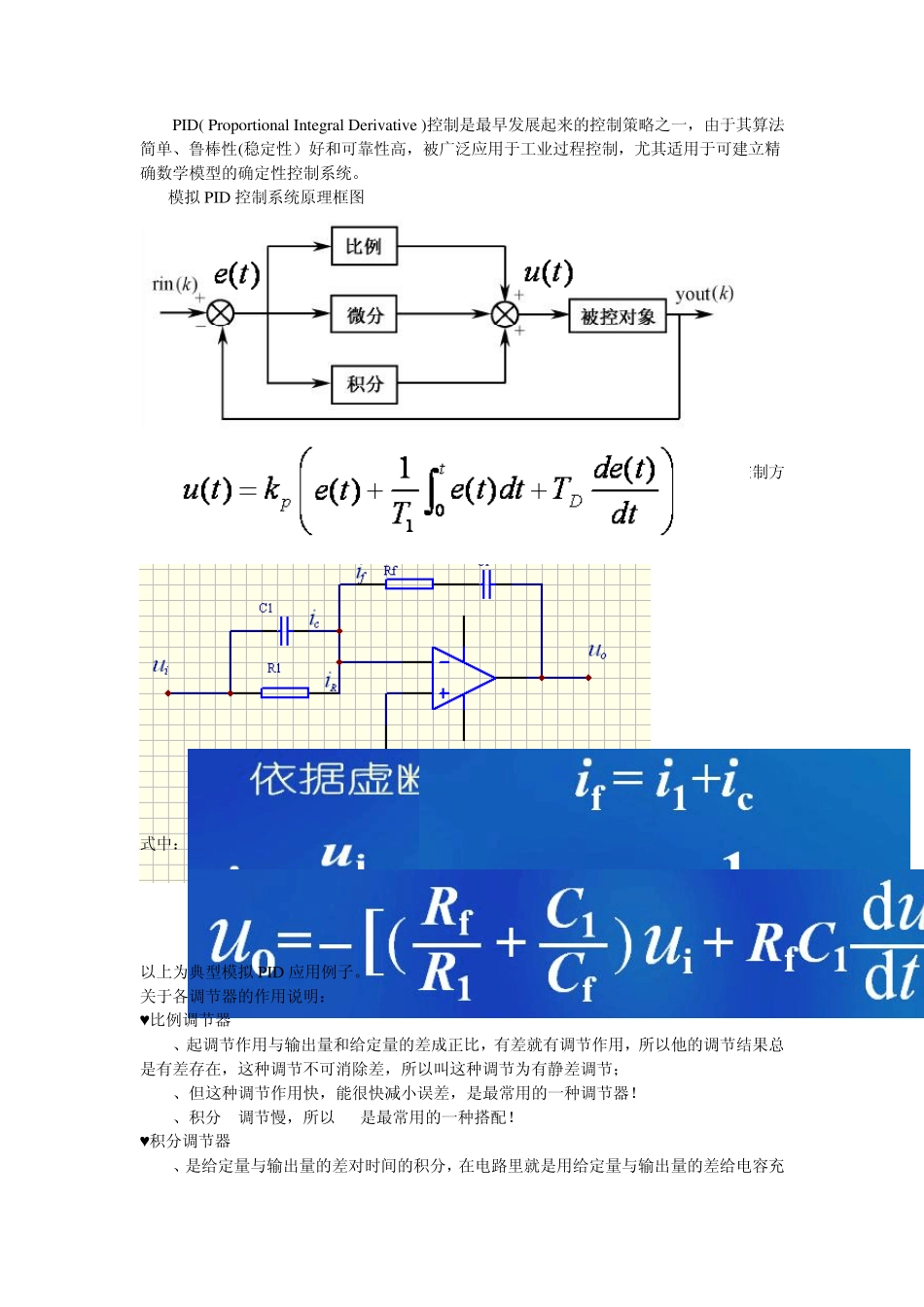
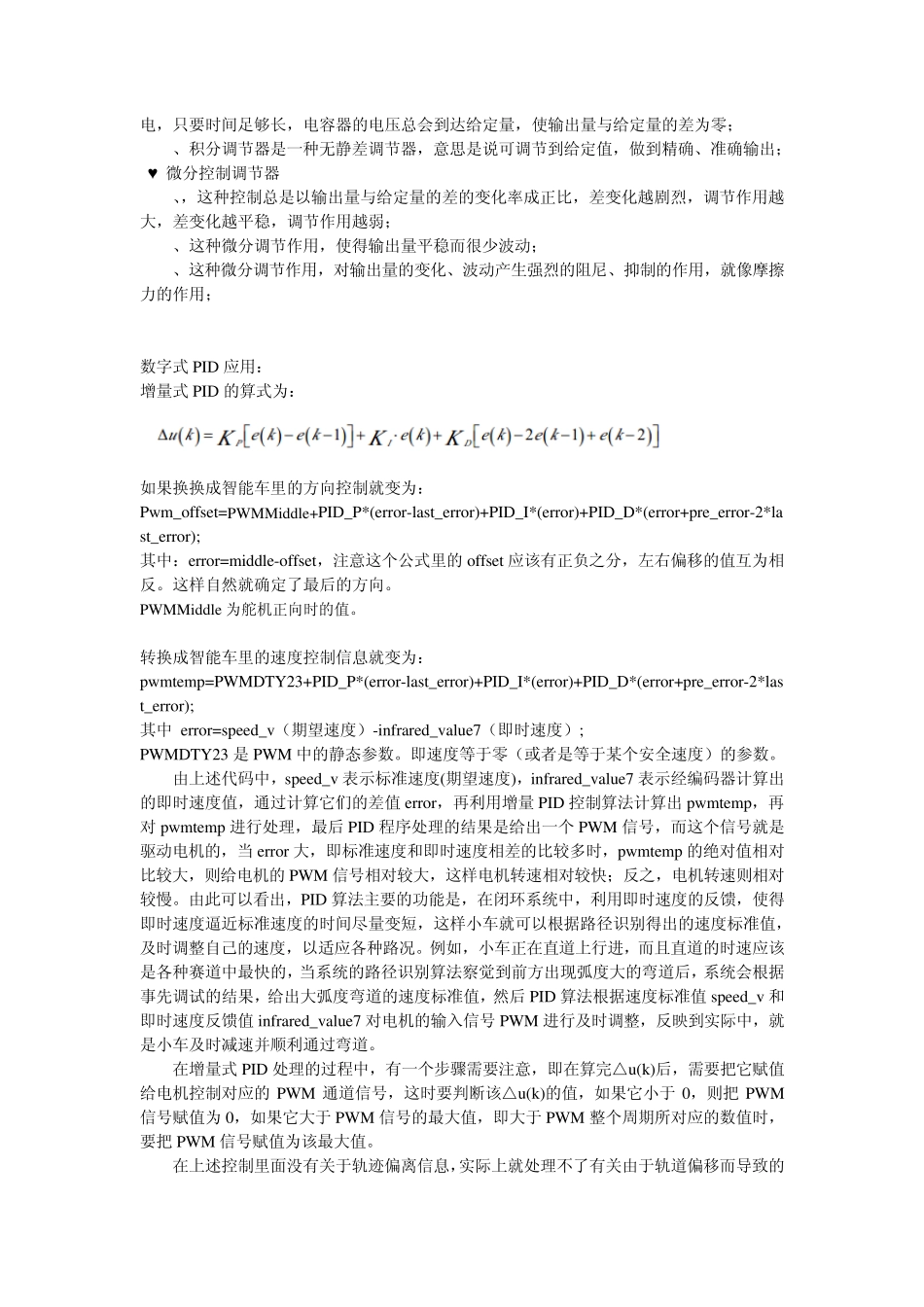
模拟 PID 控制系统原理框图 PID 是一种线性控制器,它根据给定值 rin(k)与实际输出值 y ou t(k)的差值 e(t)构成控制方案,利用运放实现模拟 PID 的一个例子: 式中: 以上为典型模拟 PID 应用例子
关于各调节器的作用说明: ♥比例调节器 P 1、起调节作用与输出量和给定量的差成正比,有差就有调节作用,所以他的调节结果总是有差存在,这种调节不可消除差,所以叫这种调节为有静差调节; 2、但这种调节作用快,能很快减小误差,是最常用的一种调节器
3、积分 I调节慢,所以 PI是最常用的一种搭配
♥积分调节器 I 1、是给定量与输出量的差对时间的积分,在电路里就是用给定量与输出量的差给电容充电,只要时间足够长,电容器的电压总会到达给定量,使输出量与给定量的差为零; 2、积分调节器是一种无静差调节器,意思是说可调节到给定值,做到精确、准确输出; ♥ 微分控制调节器 D 1、,这种控制总是以输出量与给定量的差的变化率成正比,差变化越剧烈,调节作用越大,差变化越平稳,调节作用越弱; 2、这种微分调节作用,使得输出量平稳而很少波动; 3、这种微分调节作用,对输出量的变化、波动产生强烈的阻尼、抑制的作用,就像摩擦力的作用; 数字式 PID 应用: 增量式 PID 的算式为: 如果换换成智能车里的方向控制就变为: Pw m_offset=PWMMiddle+PID_P*(error-last_error)+PID_I*(error)+PID_D*(error+pre_error-2*last_error); 其中:error=m