步进式电动机 一、前言 步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点
使得在速度、位置等控制领域用步进电机来控制变的非常的简单
二、感应子式步进电机工作原理 (一)反应式步进电机原理 由于反应式步进电机工作原理比较简单
下面先叙述三相反应式步进电机原理
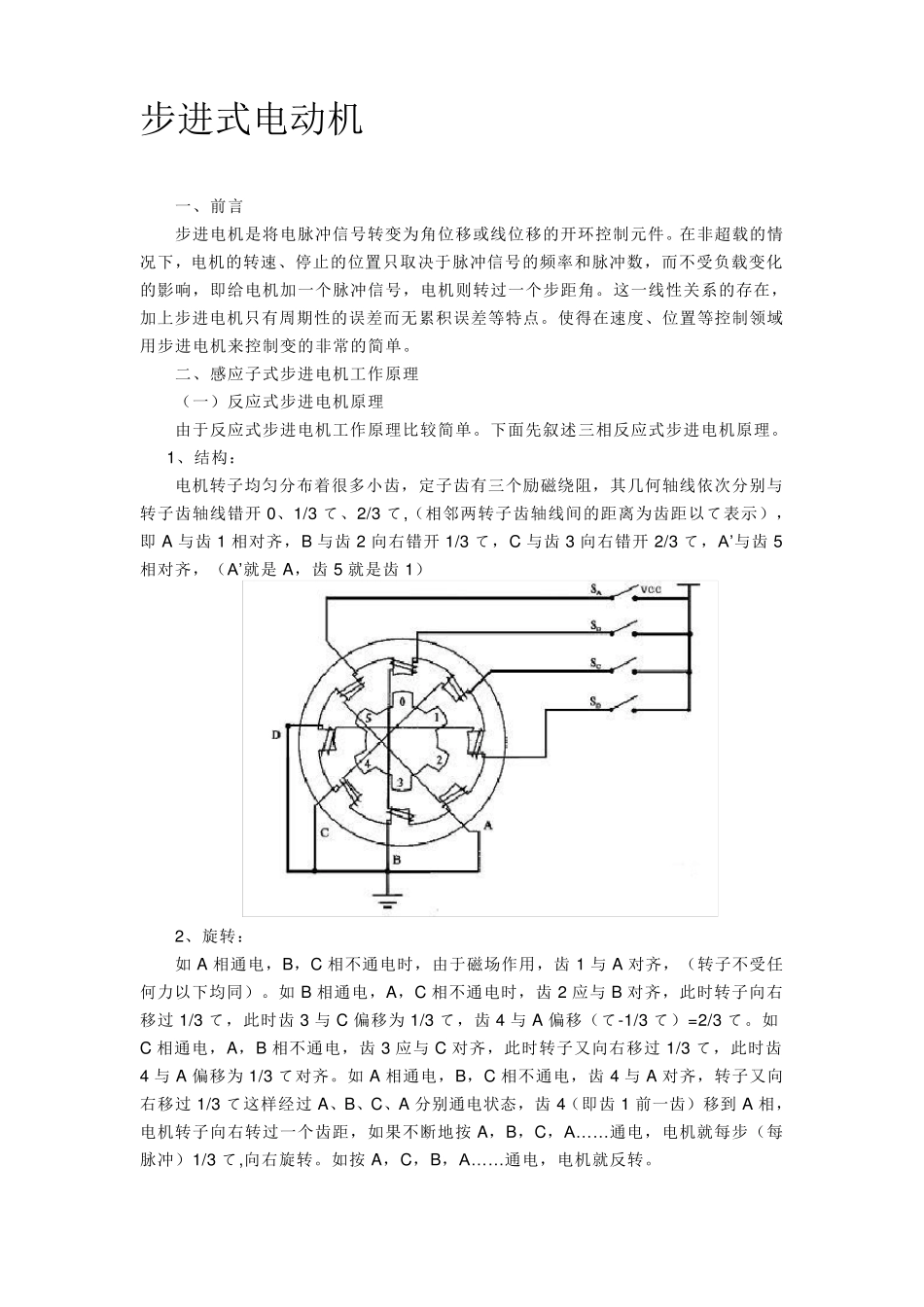
1、结构: 电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开 0、1/3 て、2/3 て,(相邻两转子齿轴线间的距离为齿距以て表示),即 A 与齿 1 相对齐,B 与齿 2 向右错开 1/3 て,C 与齿 3 向右错开 2/3 て,A’与齿 5相对齐,(A’就是 A,齿 5 就是齿 1) 2、旋转: 如A 相通电,B,C 相不通电时,由于磁场作用,齿 1 与A 对齐,(转子不受任何力以下均同)
如B 相通电,A,C 相不通电时,齿 2 应与B 对齐,此 时转子向右移过 1/3 て,此 时齿 3 与C 偏 移为 1/3 て,齿 4 与A 偏 移(て-1/3 て)=2/3 て
如C 相通电,A,B 相不通电,齿 3 应与C 对齐,此 时转子又 向右移过 1/3 て,此 时齿4 与A 偏 移为 1/3 て对齐
如A 相通电,B,C 相不通电,齿 4 与A 对齐,转子又 向右移过 1/3 て这样 经 过 A、B、C、A 分别通电状 态 ,齿 4(即齿 1 前一齿)移到A 相,电机转子向右转过一个齿距,如果 不断 地 按A,B,C,A……通电,电机就每 步(每脉冲)1/3 て,向右旋转
如按A,C,B,A……通电,电机就反转
由此可见:电机的位置和速度由导电次数(脉冲数)和频率