GPS 控制测量 测量工作必须遵循“有整体到局部,先控制后碎部,从高级到低级”的原则
先建立控制网,然后根据控制网进行碎部测量
控制网又分为平面控制网和高程控制网
测定点的平面位置的工作,称为平面控制测量,测定点的高程工作,称为高程控制测量
目前,数字化成图的外业控制测量一般分为 GPS 首级控制测量和全站仪导线测量及水准测量
(一)GPS控制测量概述 GPS 控制测量,按其工作性质可分为外业和内业两大部分,外业工作主要包括:选点、建立测站标志、埋石、野外观测作业以及成果质量检核等;内业工作主要包括:技术设计、测后数据处理以及技术总结等
按照 GPS 测量实施的工作程序,大体分为几个阶段:GPS 控制网的优化设计,选点与埋石,外业观测,成果检核,数据处理,编制报告
GPS 测量是一项技术复杂、要求严格的工作,实施的原则是,在满足用户对测量精度和可靠性等要求的情况下,尽可能地减少经费、时间和人力的消耗
因此,对其各阶段的工作,都要精心设计、组织和实施
为了满足实际的要求,GPS 测量作业应遵守统一的规范和细则
GPS 控制测量与GPS 定位技术的发展水平密切相关,GPS 接收机硬件与软件的不断改善,将直接影响测量工作的实施方法、观测时间、作业要求和成果的处理方法
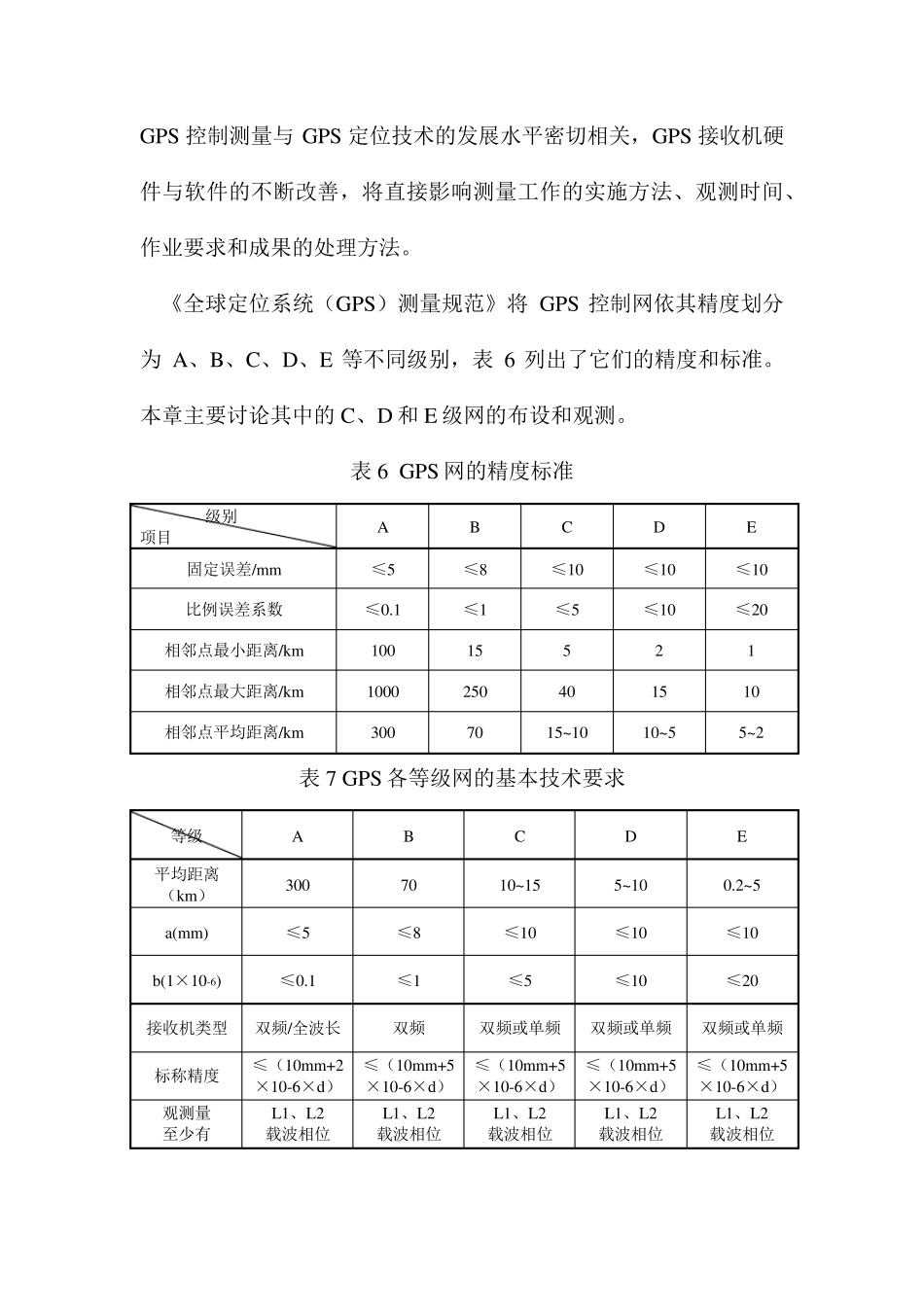
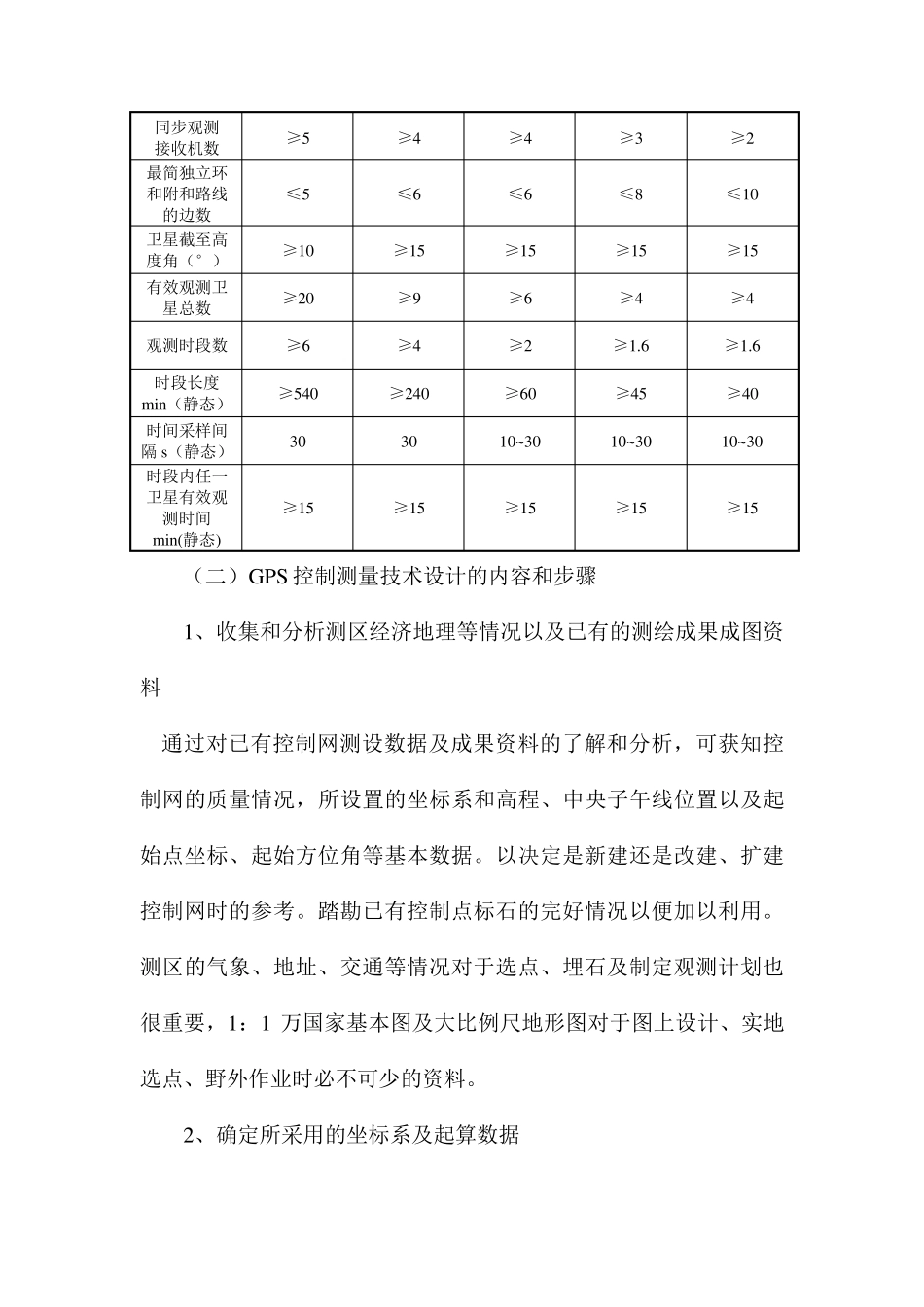
《全球定位系统(GPS)测量规范》将GPS 控制网依其精度划分为A、B、C、D、E 等不同级别,表6 列出了它们的精度和标准
本章主要讨论其中的C、D 和E 级网的布设和观测
表6 GPS 网的精度标准 级别 项目 A B C D E 固定误差/mm ≤5 ≤8 ≤10 ≤10 ≤10 比例误差系数 ≤0
1 ≤1 ≤5 ≤10 ≤20 相邻点最小距离/km 100 15 5 2 1 相邻点最大距离/km 1000 250 40 15 10 相邻点平均距离/km 300 70 15~10 10~5 5~2