印刷机送纸机构虚拟设计 2007-6-6 11:52:00 网络转载 供稿 数字化虚拟样机技术是缩短产品开发周期,降低开发成本,提高产品设计和制造的重要途径
目前国外设计部门都已经大规模地应用到机械的运动学和动力学仿真,利用仿真的概念,使设计流程由设计—实验—改进设计—再实验—再设计的设计理念转变为设计—仿真—实验,使设计中的关键问题在设计初期以参数化,数字化的形式加以解决
长期以来,印刷机的送纸机构的分析和设计处于图解、公式计算分析的基础上,以简化性为前提,不仅效率低下,结果难免具有近似性和粗糙性
采用计算机辅助技术虽然改变了手工计算的方法带来的不便,但仍然以近似简化假设为基础,并没有把分析和设计结合起来,尤其对于优化,不能设计系统的优化程序和模型,给工程设计带了一个难题,而采用虚拟样机技术可有效的解决以上问题
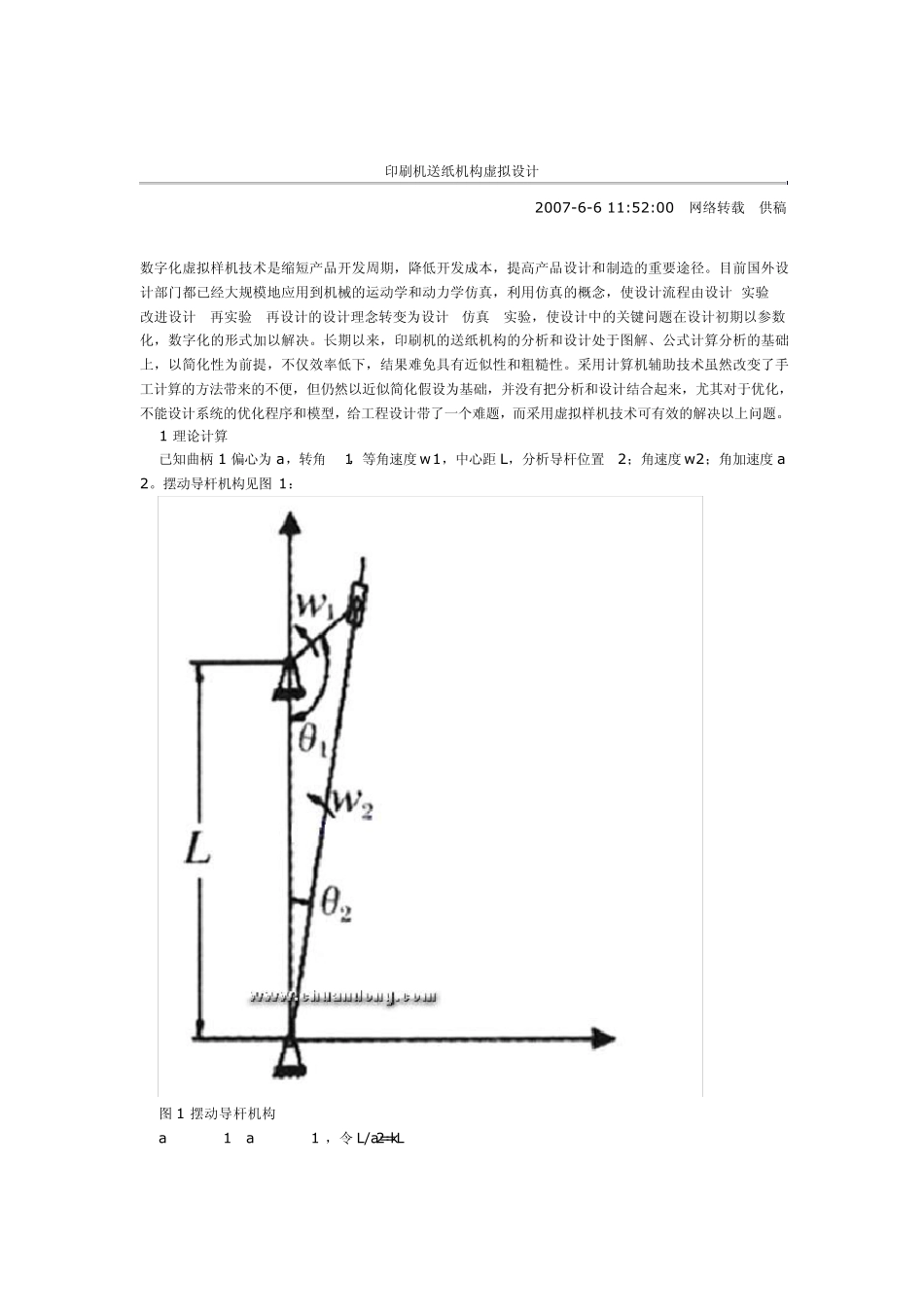
1 理论计算 已知曲柄 1 偏心为a,转角 θ1,等角速度 w 1,中心距 L,分析导杆位置 θ2;角速度 w 2;角加速度 a2
摆动导杆机构见图1: 图1 摆动导杆机构 acosθ1+asinθ1cotθ2=L,令 L/a=k cotθ2=kcscθ1-cotθ1,两边对t 求导得: w 2csc2θ2=(kcscθ1cotθ1-csc2θ1)w 1 w 2=(kcosθ1-1)w 1/(k2+1-2kcosθ1)两边对t 求导得: a2=(kcosθ1-1)a1/(k2+1-2kcosθ1)-(k2-1)kw 12sinθ1/(k2+1-2kcosθ1)2 摇杆滑块机构见图2
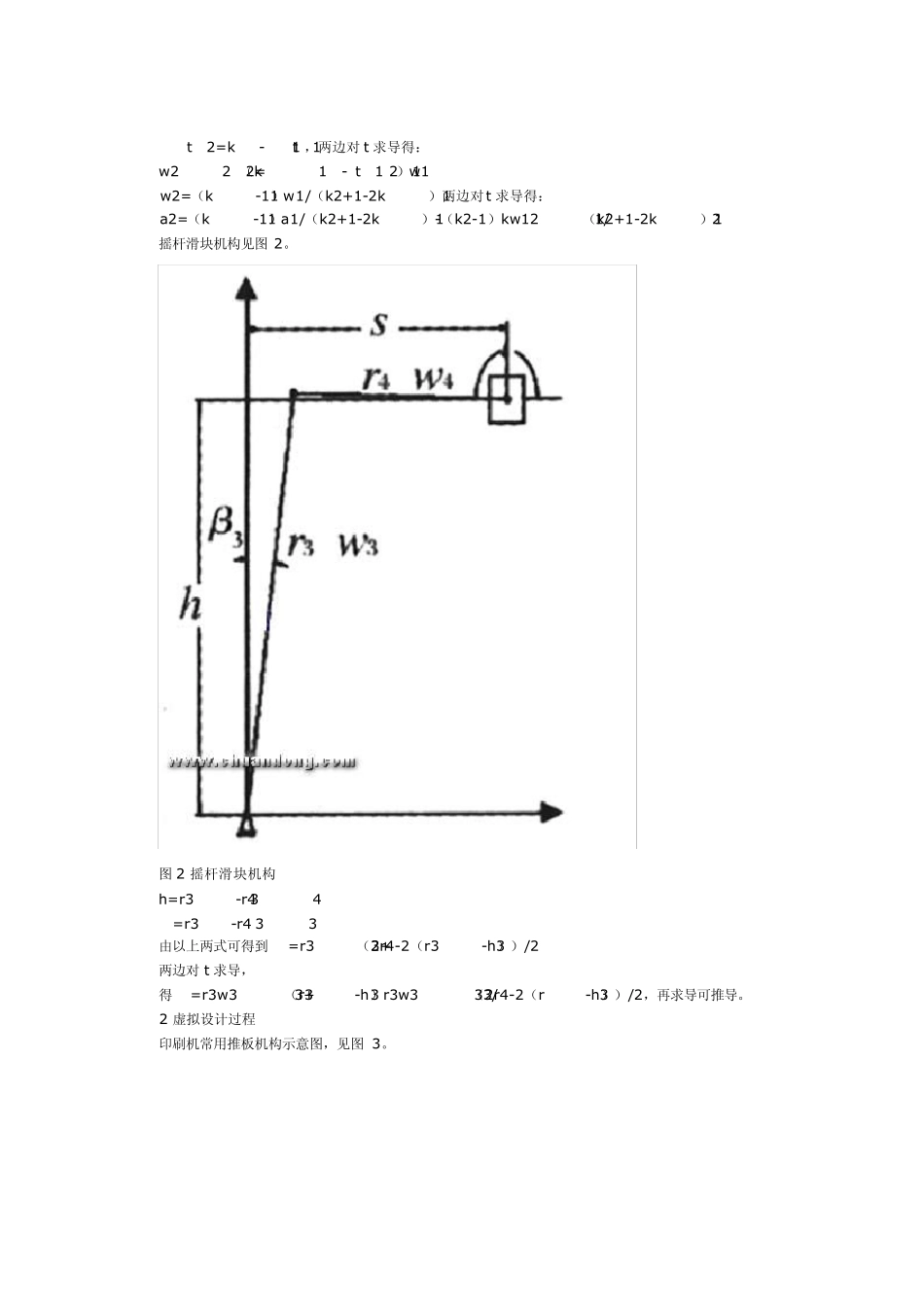
图2 摇杆滑块机构 h=r3cosβ3-r4sinβ4 s=r3sinβ3-r4cosβ3 由以上两式可得到 s=r3sinβ3+(2r4-2(r3cosβ3-h))/2 两边对t 求导, 得v=r3w 3cosβ3+(r3cosβ3-h)r3w 3sinβ33/(2r4-2(rc