1 定位原理及定位误差计算 1
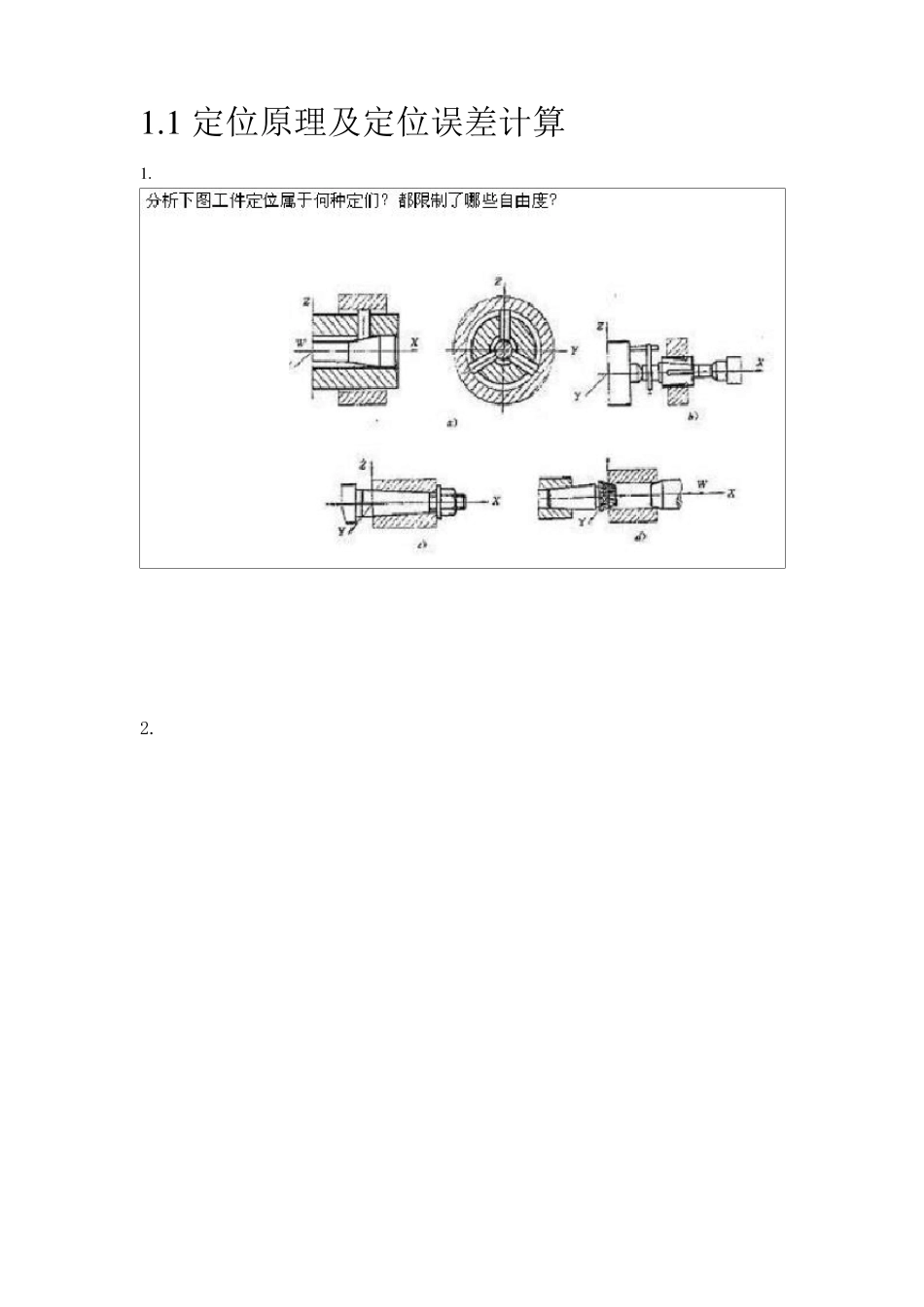
不完全定位,限制了x y z 和y z ,合理 b
完全定位,六个自由度都限制了,合理 c
过定位,x 重复定位,可将左顶尖去除或者改为自由顶尖 3
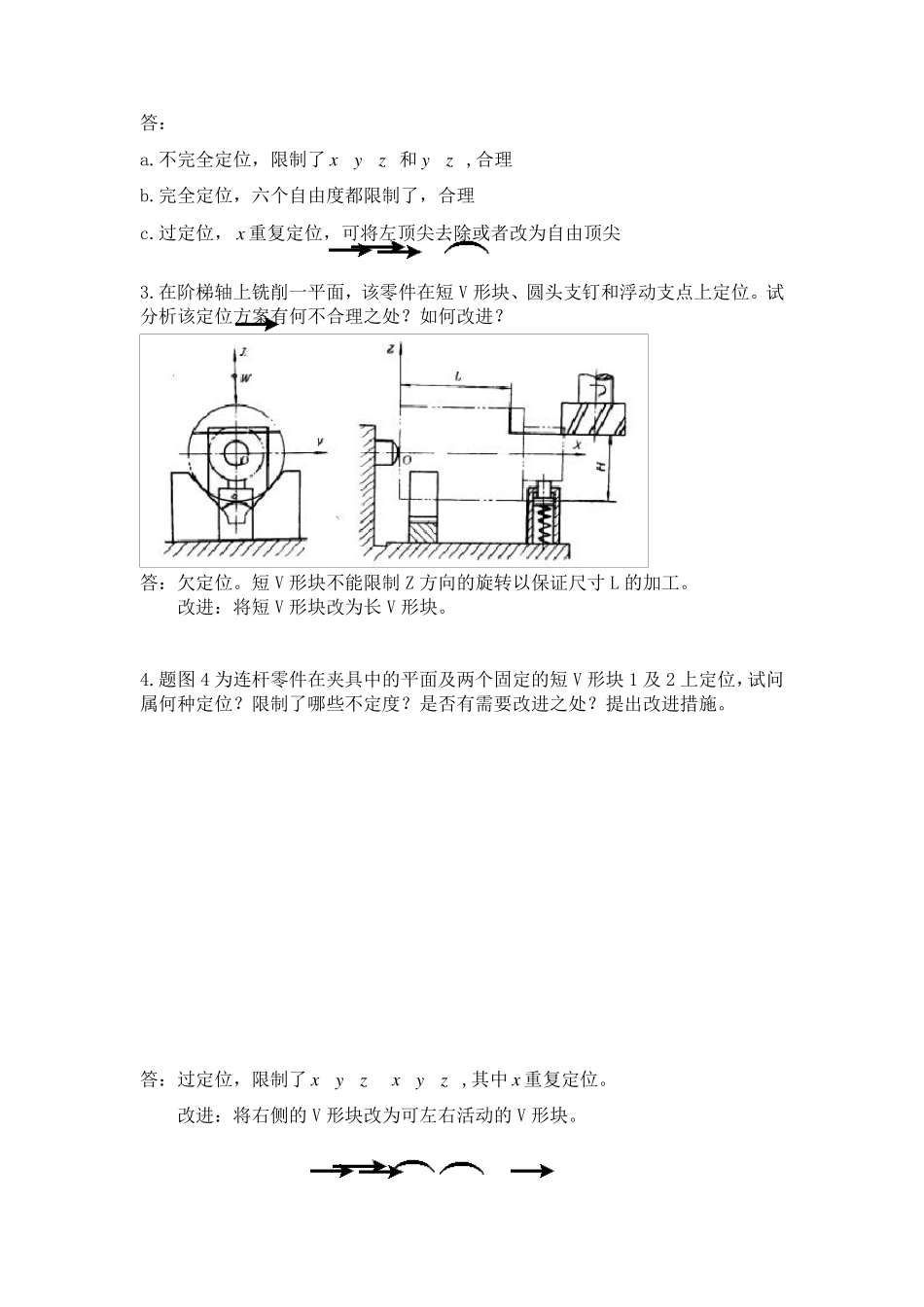
在阶梯轴上铣削一平面,该零件在短V 形块、圆头支钉和浮动支点上定位
试分析该定位方案有何不合理之处
短V 形块不能限制Z 方向的旋转以保证尺寸 L 的加工
改进:将短V 形块改为长 V 形块
题图 4 为连杆零件在夹具中的平面及两个固定的短V 形块1 及 2 上定位,试问属何种定位
限制了哪些不定度
是否有需要改进之处
提出改进措施
答:过定位,限制了x y z x y z ,其中 x 重复定位
改进:将右侧的 V 形块改为可左右活动的 V 形块
答:该方案属于六点定位
左边两个短 V 形块相当于一个长 V 形块,限制了 y y z z 四个自由度,右边短 V 形块限制了 x x 两个自由度
试确定合理的定位方案并绘制定位方案草图
答:一面两销定位原理
9.题图9 为在杆件上有宽度为b 的开口槽,内孔D 已加工,试确定合理的定位方案并绘制定位方案草图
答:直径为d 的圆弧端用V 形块定位,半径为D 的内孔用浮动菱形销定位
题图11(a)为在圆盘零件上加工O1、O2 及O3 三孔的工序简图,题图11(b)、(c)、(d)为用三轴钻床及钻模同时加工三孔的几种定位方案(工件底面的定位元件未表示),试分别计算当α=90°时各定位方案的定位误差
解:加工面C 以O1O2 连线为基准,因此=0不重 1=0
08662sin 2OTd 位置 2=0
12OTd位置 120
1866=arctanarctan2160OOL位置位置角度 121=0
18663LOOTd定位不