1 总体方案设计 根据课题设计任务书的要求,确定总体方案: 1
抓重:10kg 2
坐标形式:圆柱坐标 3
自由度:3 4
手臂运动参数: 运动名称 符号 行程范围 速度 伸缩 X 300mm 小于200mm/s 升降 Z 200mm 小于100mm/s 回转 α 180° 小于90(°)/s 手指夹持范围:棒料,半径 40mm~60mm
定为方式:机械挡块(行程开关)
驱动方式:液压驱动
控制方式:PLC(可编程序控制) 定位精度:±2mm
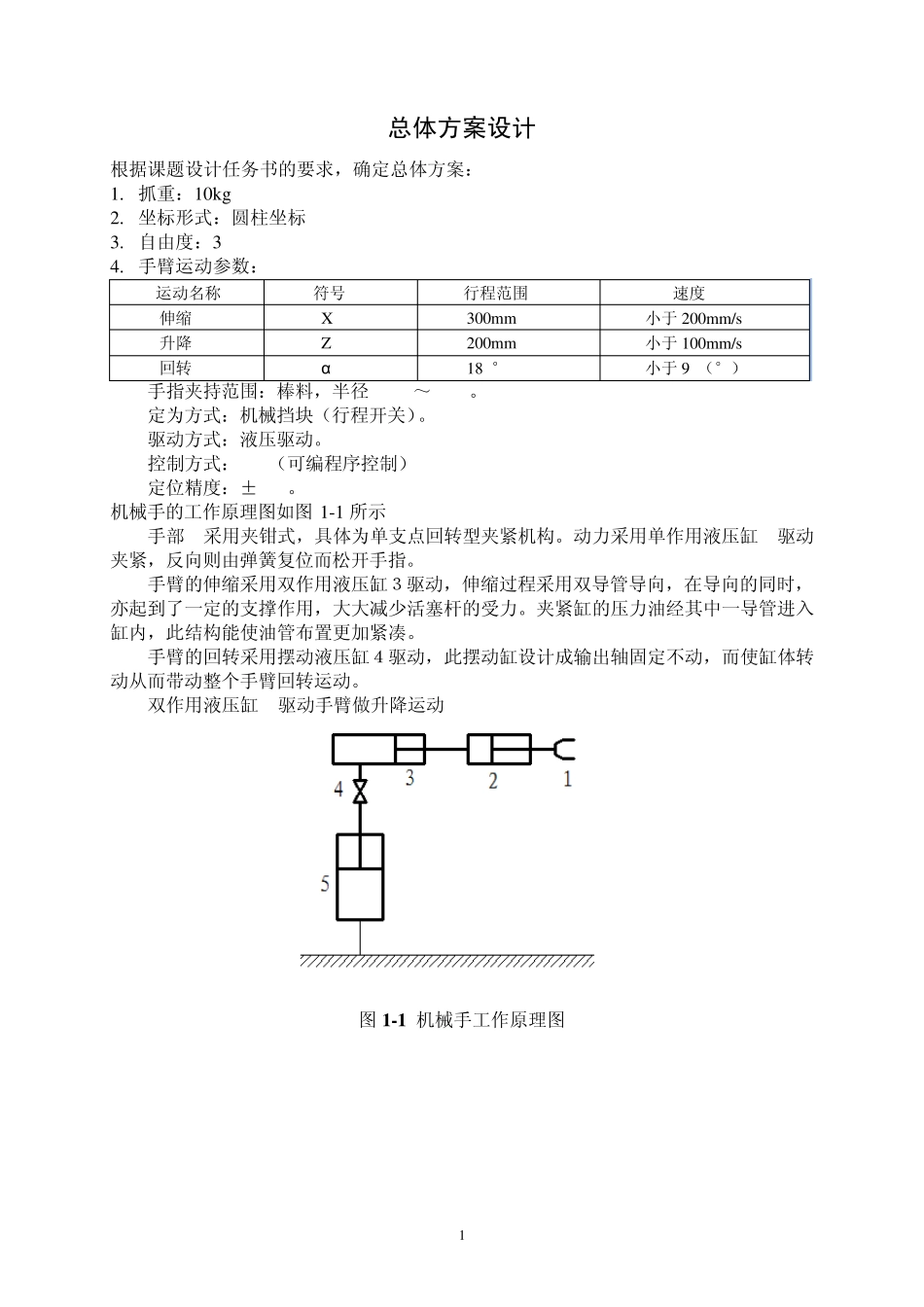
机械手的工作原理图如图 1-1 所示 手部 1采用夹钳式,具体为单支点回转型夹紧机构
动力采用单作用液压缸 2驱动夹紧,反向则由弹簧复位而松开手指
手臂的伸缩采用双作用液压缸3驱动,伸缩过程采用双导管导向,在导向的同时,亦起到了一定的支撑作用,大大减少活塞杆的受力
夹紧缸的压力油经其中一导管进入缸内,此结构能使油管布置更加紧凑
手臂的回转采用摆动液压缸4驱动,此摆动缸设计成输出轴固定不动,而使缸体转动从而带动整个手臂回转运动
双作用液压缸 5驱动手臂做升降运动 图 1 -1 机械手工作原理图 2 手部设计 手部(亦称抓取机构)是用来直接握持工件的部件,由于被握持工件的形状、尺寸大小、重量、材料性能、表面处理等的不同,则机械手的手部机构是多种多样的,大部分的手部结构是根据特定的工件要求而设计的(林建龙,王小北,2003)
常用的手部,按其握持工件的原理,大致可分成夹持式和吸附式两大类
本设计采用常用的夹钳式手部结构,它是最常见的夹持式结构
夹钳式手部是由手指、传动机构和驱动装置三部分组成的,它对抓取各种形状的工件具有较大的适应性,可以抓取轴、盘和套类零件(殷际英,何广平,2003)
一般情况下多采用两个手指,少数采用三指或多指
本设计中的工件是棒料,所以选择较简单的两指结构
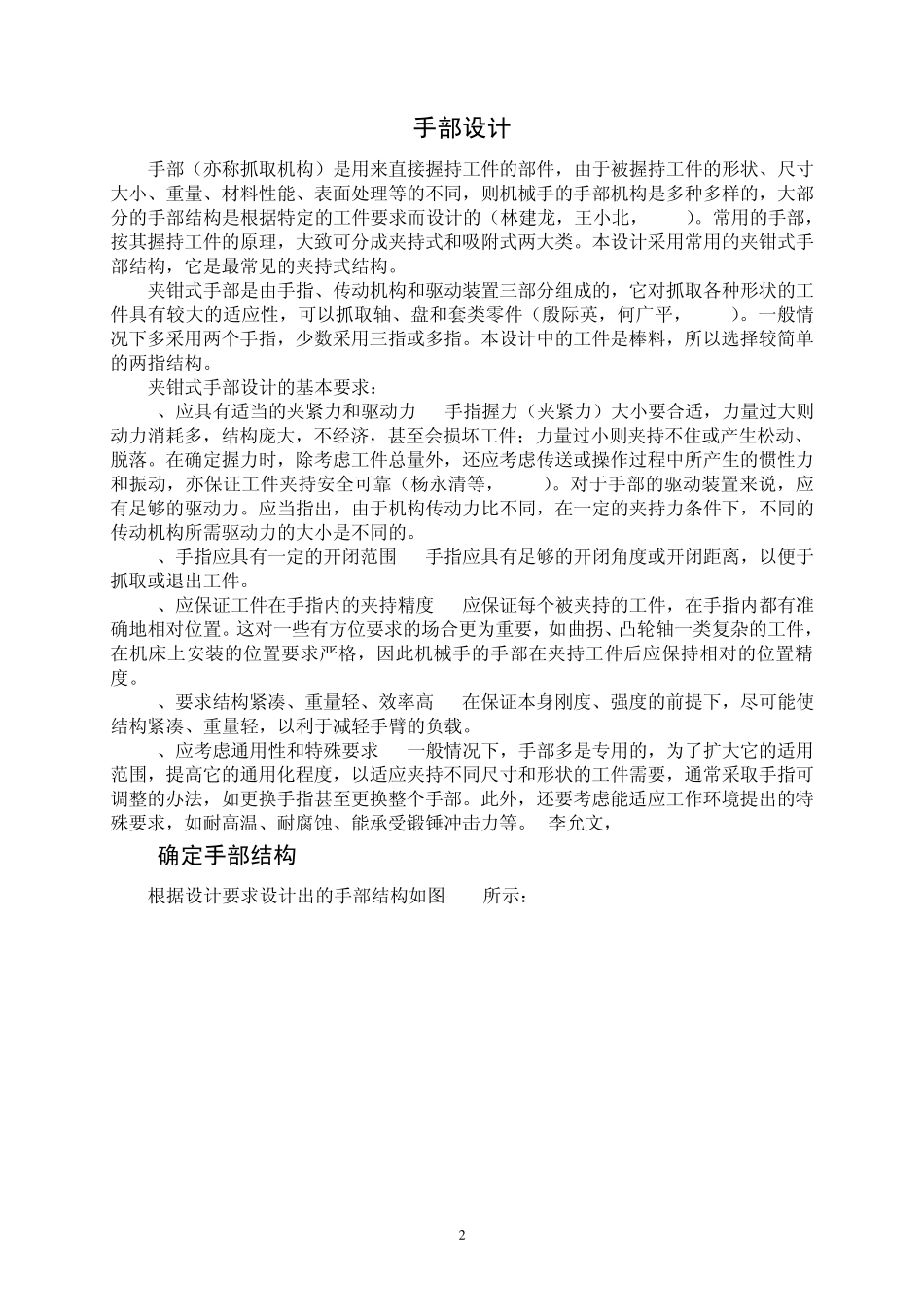
夹钳式手部设计的基本要求: 1、应具