电源反馈设计速成篇之五: 设计篇 (Voltage mode, CCM) 设计的目的是为了系统稳定且有足够频率响应使系统在负载变化时得到较小的电压波动
传统的无差运放调节器分为一类(Ty pe 1), 二类(Ty pe 2)和三类(Ty pe 1), 对应其有一个, 两个和三个极点
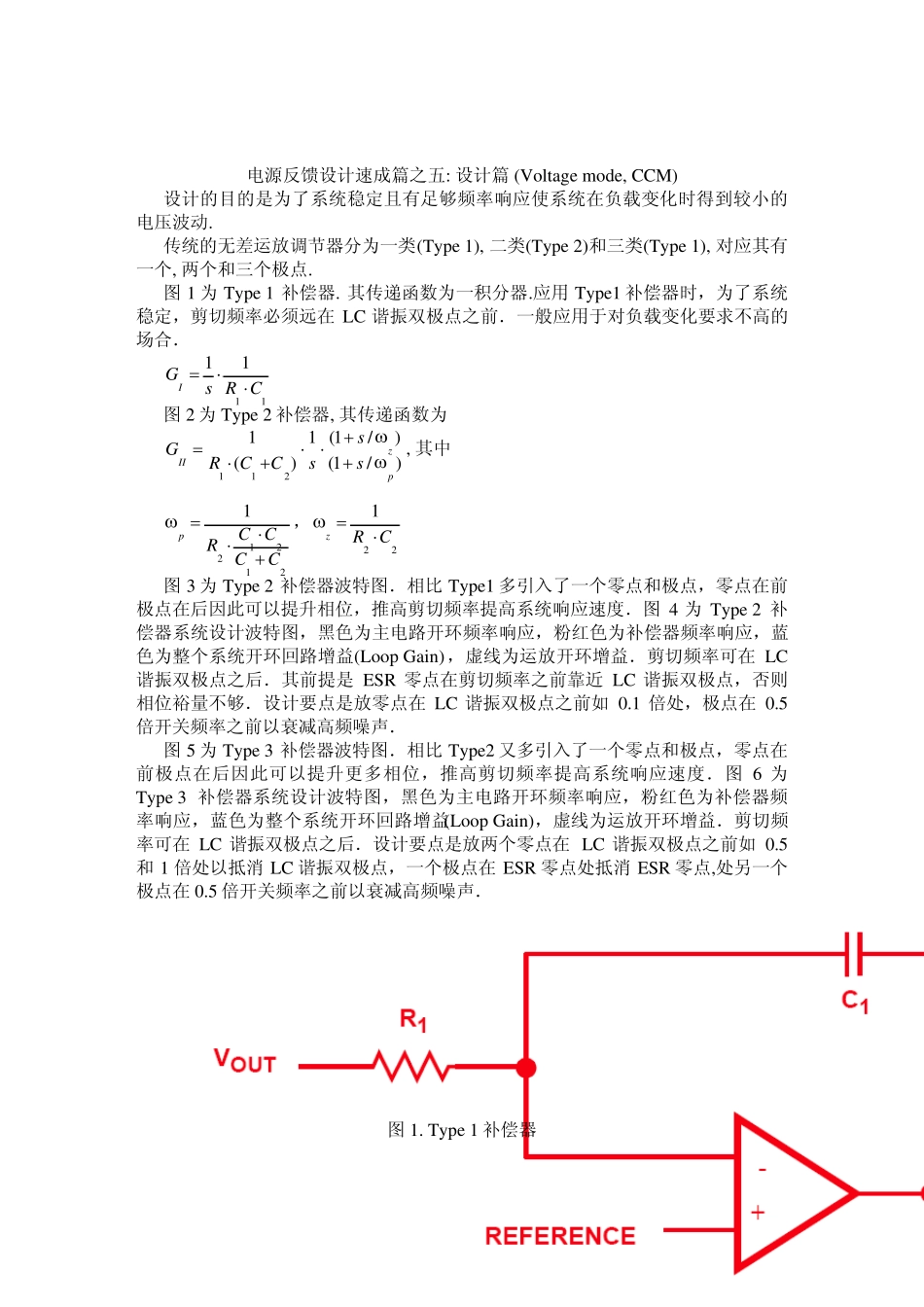
图1 为Ty pe 1 补偿器
其传递函数为一积分器
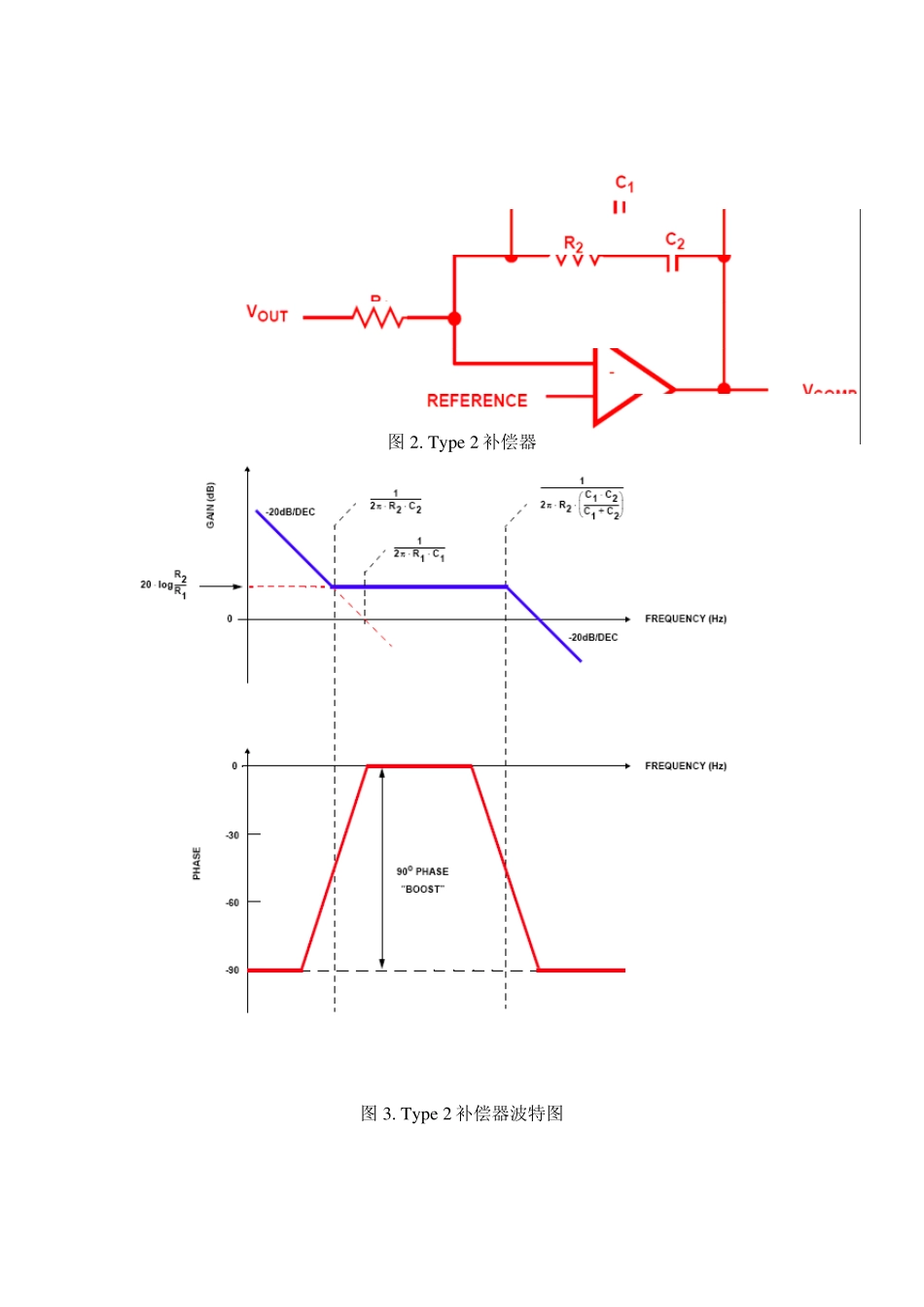
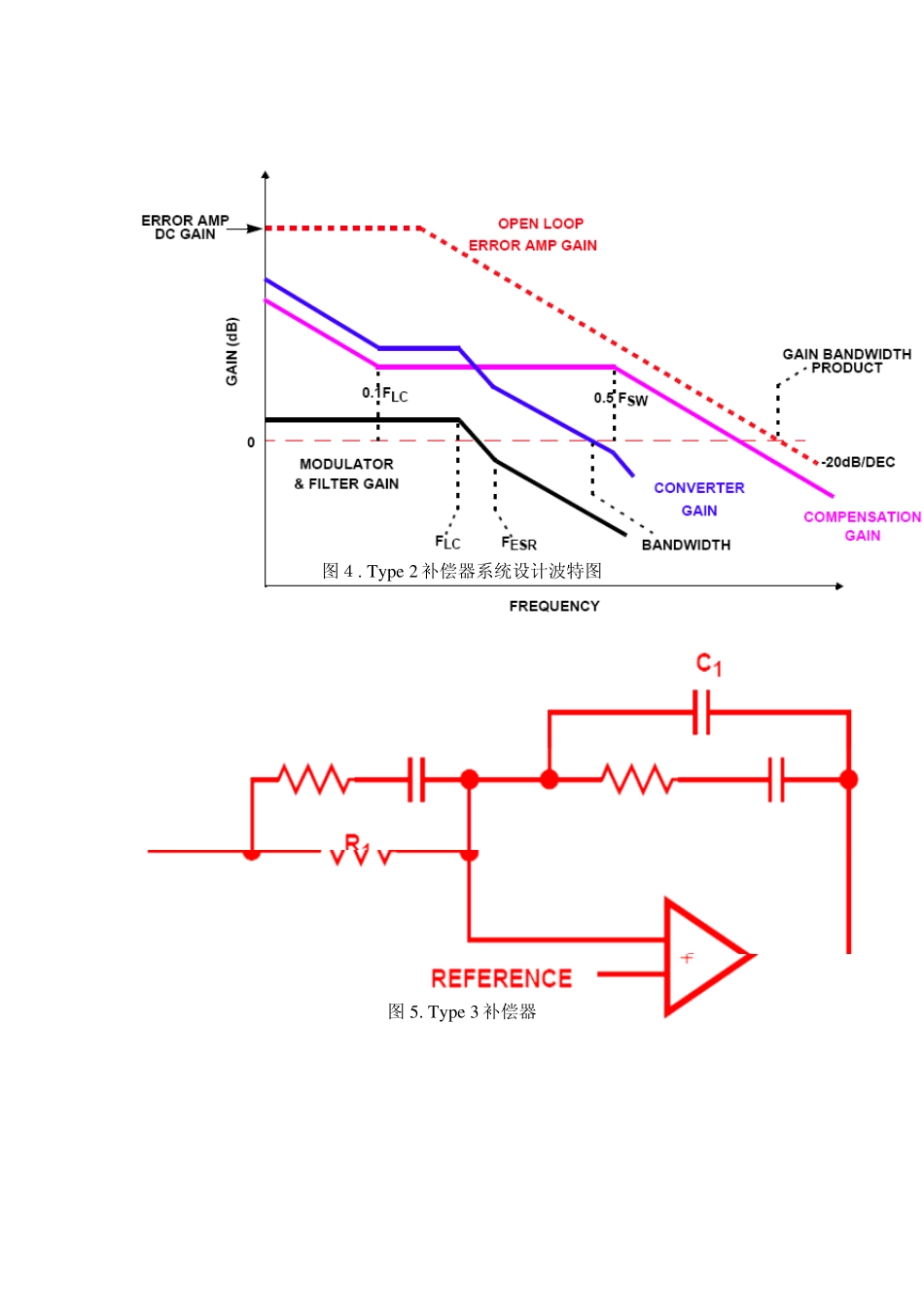
应用Ty pe1 补偿器时,为了系统稳定,剪切频率必须远在LC 谐振双极点之前.一般应用于对负载变化要求不高的场合. 1111CRsGI⋅⋅= 图2 为Ty pe 2 补偿器, 其传递函数为 )/1()/1(1)(1211pzIIsssCCRGωω++⋅⋅+⋅=, 其中 212121CCCCRp+⋅⋅=ω,221CRz⋅=ω 图3 为Ty pe 2 补偿器波特图.相比 Ty pe1 多引入了一个零点和极点,零点在前极点在后因此可以提升相位,推高剪切频率提高系统响应速度.图4 为Ty pe 2 补偿器系统设计波特图,黑色为主电路开环频率响应,粉红色为补偿器频率响应,蓝色为整个系统开环回路增益(Loop Gain),虚线为运放开环增益.剪切频率可在LC谐振双极点之后.其前提是ESR 零点在剪切频率之前靠近 LC 谐振双极点,否则相位裕量不够.设计要点是放零点在LC 谐振双极点之前如 0
1 倍处,极点在0
5倍开关频率之前以衰减高频噪声. 图5 为Ty pe 3 补偿器波特图.相比 Ty pe2 又多引入了一个零点和极点,零点在前极点在后因此可以提升更多相位,推高剪切频率提高系统响应速度.图6 为Ty pe 3 补偿器系统设计波特图,黑色为主电路开环频率响应,粉红色为补偿器频率响应,蓝色为整个系统开环回路增益(Loop Gain),虚线为运放开环增益.剪切频率可在LC 谐振双极点之后.设计要点是放两个零点在LC 谐振双极点之前如 0