目动驾驶关键难点摘要:本文将介绍自动驾驶等级分类标准、自动驾驶软硬件架构图以及自动驾驶涉及到的关键技术等美国汽车工程师协会根据汽车智能化程度将自动驾驶分为 L0-L5 共 6 个等级:L0 为无自动化(NoAutomation,NA),即传统汽车,驾驶员执行所有的操作任务,例如转向、制动、加速、减速或泊车等;L1 为驾驶辅助(DrivingAssistant,DA),即能为驾驶员提供驾驶预警或辅助等,例如对方向盘或加速减速中的一项操作提供支持,其余由驾驶员操作;L2 为部分自动化(PartialAutomation,PA),车辆对方向盘和加减速中的多项操作提供驾驶,驾驶员负责其他驾驶操作;L3 为条件自动化(ConditionalAutomation,CA),即由自动驾驶系统完成大部分驾驶操作,驾驶员需要集中注意力以备不时之需;L4 为高度自动化(HighAutomation,HA),由车辆完成所有驾驶操作,驾驶员不需要集中注意力,但限定道路和环境条件;L5 为完全自动化(FullAutomation,FA),在任何道路和环境条件下,由自动驾驶系统完成所有的驾驶操作,驾驶员不需要集中注意力
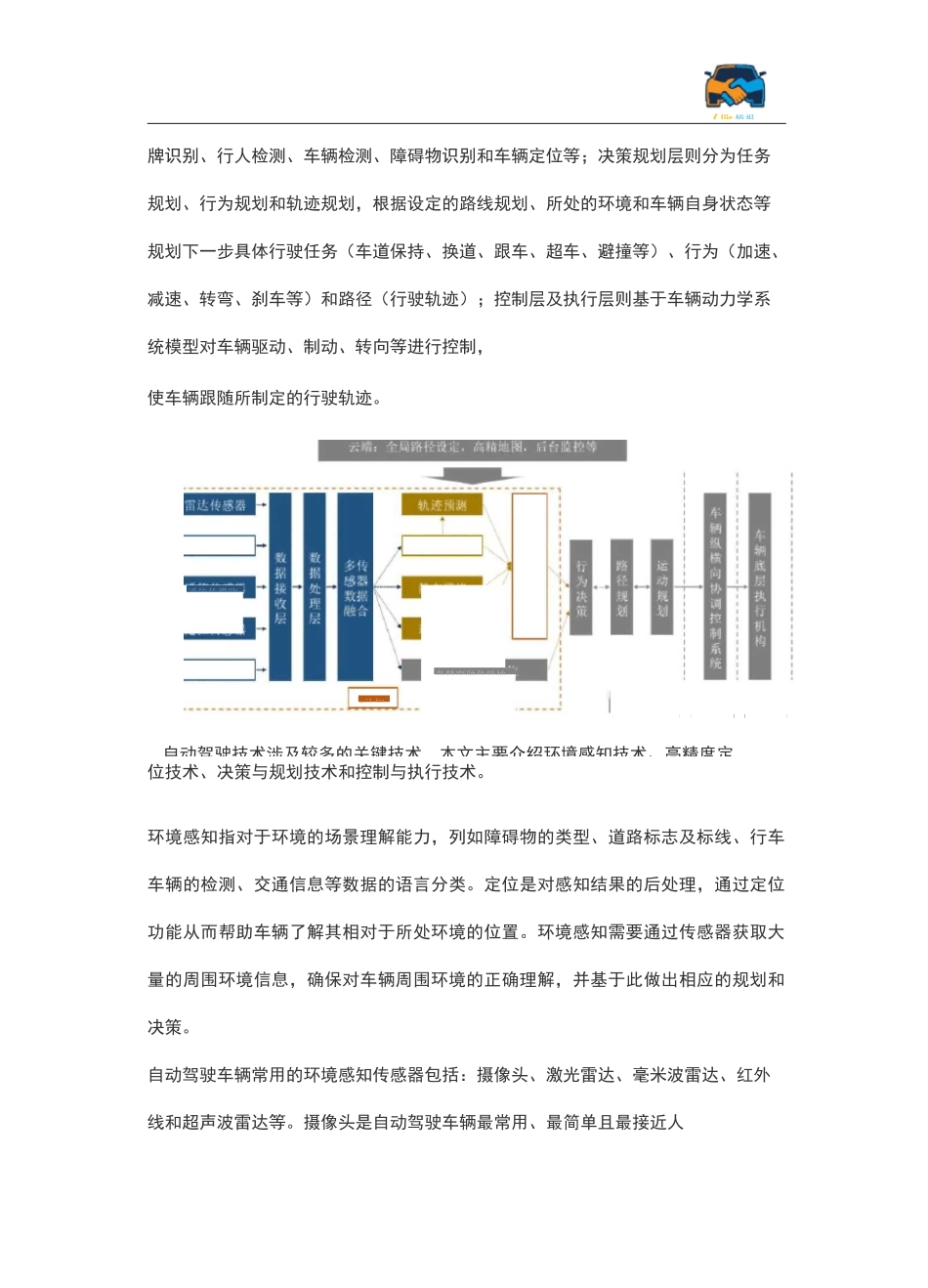
自动驾驶汽车的软硬件架构如图 2 所示,主要分为环境认知层、决策规划层、控制层和执行层
环境认(感)知层主要通过激光雷达、毫米波雷达、超声波雷达、车载摄像头、夜视系统、GPS、陀螺仪等传感器获取车辆所处环境信息和车辆状态信息,具体来说包括:车道线检测、红绿灯识别、交通标识[决触1 控制尺1|执 f牌识别、行人检测、车辆检测、障碍物识别和车辆定位等;决策规划层则分为任务规划、行为规划和轨迹规划,根据设定的路线规划、所处的环境和车辆自身状态等规划下一步具体行驶任务(车道保持、换道、跟车、超车、避撞等)、行为(加速、减速、转弯、刹车等)和路径(行驶轨迹);控制层及执行层则基于车辆动力学系统模型