第 3 章 沟 通 伺 服 运 动 控 制 系统模 型 及 仿 真 分 析PMSM(三相永磁同步电机,permanent magnet Synchronous motor )PMSM位置伺服系统具有位置环、速度环和电流环三闭环结构,电流环和速度环作为系统的内环,位置环为系统外环
本章介绍沟通伺服运动控制的体系结构及组成
基于PMSM及其驱动器为核心的伺服运动控制系统,建立其数学模型并进行仿真分析
从 分 析 影 响 电 流 环 性 能 的 因 素 着 手 , 提 出 了PMSM位置伺服系统电流环综合设计方案
速度环的设计分别采纳PI控制和变结构控制,位置环的设计采纳变结构控制
滑模变结构控制可以提高系统的响应速度、实现定位无超调、改善对负载扰动的鲁棒性和对参数变化的鲁棒性
仿真模块基于MATLAB/Simulink 和Powerlib 模块库搭建起来的
1 永 磁 同 步 电 动 机 沟 通 伺服 运 动 控 制 系 统沟通伺服电动机--- 工厂自动化(FA)中广泛应用
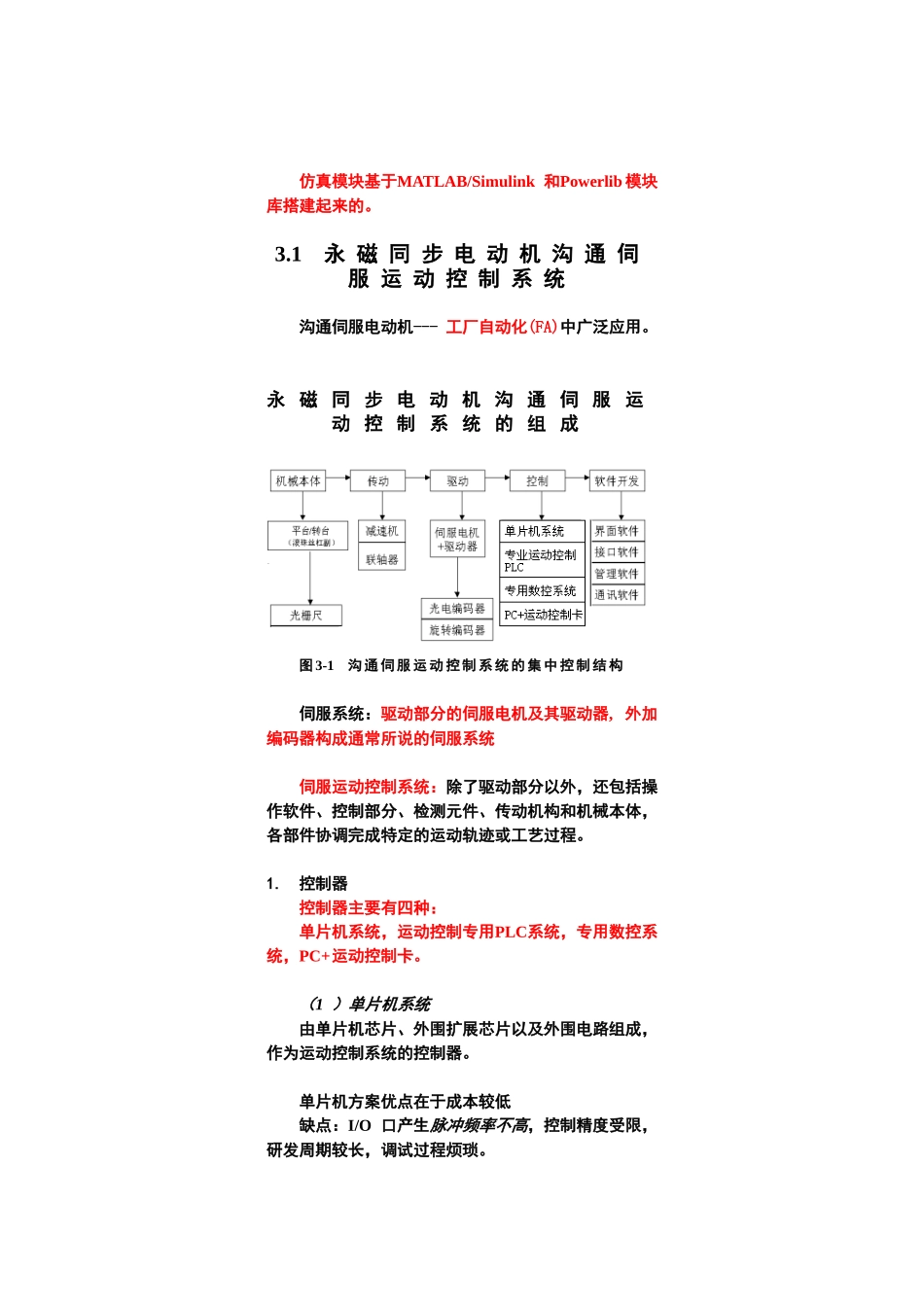
永 磁 同 步 电 动 机 沟 通 伺 服 运动 控 制 系 统 的 组 成图 3-1 沟 通 伺 服 运 动 控 制 系 统 的 集 中 控 制 结 构伺服系统:驱动部分的伺服电机及其驱动器, 外加编码器构成通常所说的伺服系统伺服运动控制系统:除了驱动部分以外,还包括操作软件、控制部分、检测元件、传动机构和机械本体,各部件协调完成特定的运动轨迹或工艺过程
控制器控制器主要有四种:单片机系统,运动控制专用PLC系统,专用数控系统,PC+运动控制卡
(1 )单片机系统由单片机芯片、外围扩展芯片以及外围电路组成,作为运动控制系统的控制器
单片机方案优点在于成本较低缺点:I/O 口产生脉冲频率不高,控制精度受限,研发周期较长,调试过程烦琐
(2 )运动控制专用PLC系统许多品牌的PLC都可选配定位控制模