7、4 盾构隧道施工测量7、4、1 盾构机始发初始状态测量7、4、1、1 盾构机始发初始状态测量得主要内容与目得(1)盾构机导轨定位测量盾构机导轨测量主要控制导轨得中线与设计隧道中线偏差不能超限,导轨得前后高程与设计高程不能超限,导轨下面就是否坚实平整等
(2)反力架定位测量反力架定位测量包括反力架得高度、俯仰度、偏航等,反力架下面就是否坚实、平整
反力架得稳定性直接影响到盾构机始发掘进就是否能正常根据设计得方位进行
(3) 演算工房导向系统初始测量盾构机姿态盾构机姿态初始测量包括测量水平偏航、俯仰度、扭转度
盾构机得水平偏航、俯仰度就是用来推断盾构机在以后掘进过程中就是否在隧道设计中线上前进,扭转度就是用来推断盾构机就是否在容许范围内发生扭转
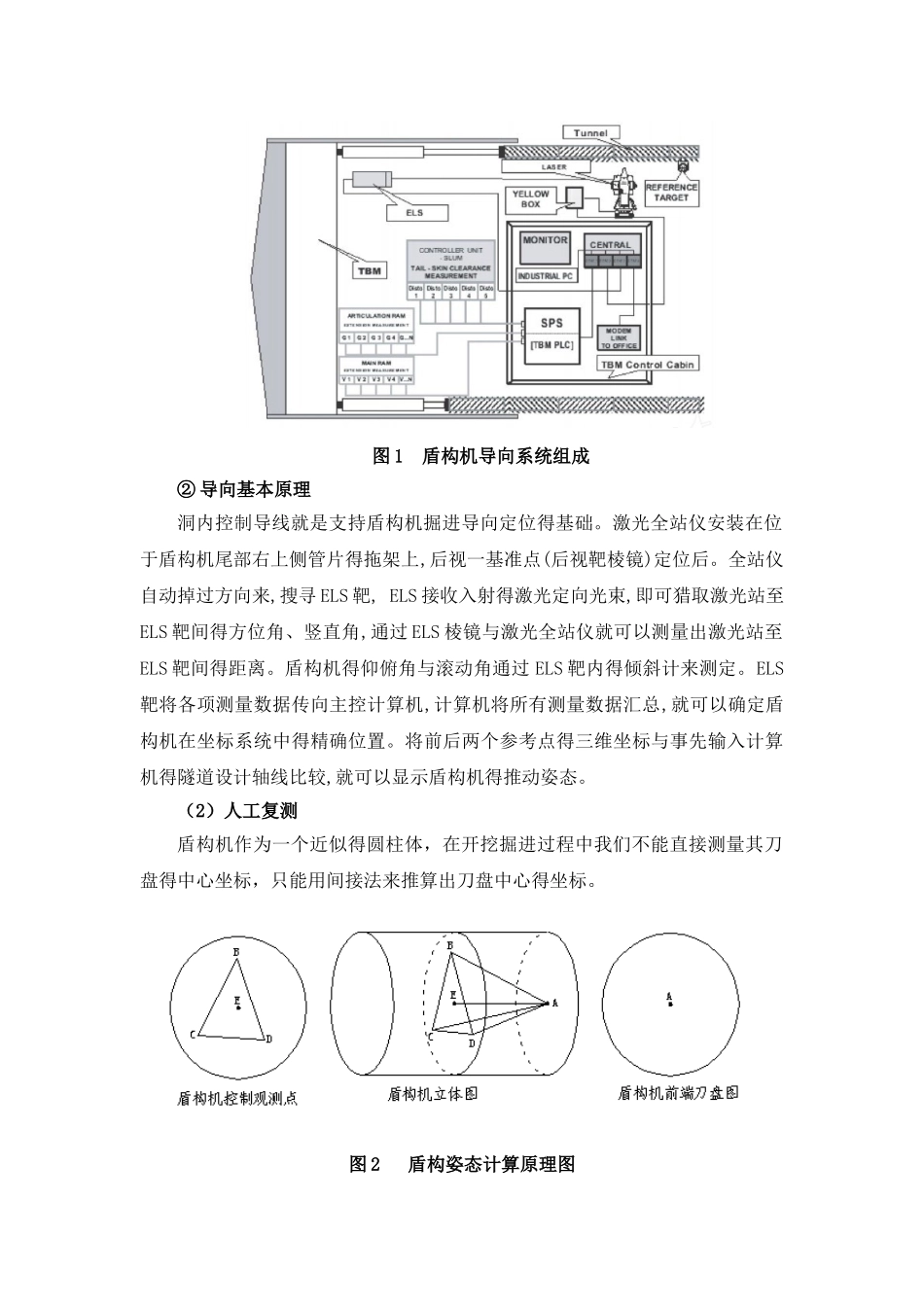
(4) 人工复测盾构姿态为了保证导向系统得正确性与可靠性,在盾构机始发前,应进行盾构姿态得人工检测
7、4、1、2 盾构机姿态测量原理(1)演算工房导向系统① 导向系统介绍在掘进隧道得过程中,为了避开盾构机发生意外得运动及方向得突然改变, 必须对盾构机得位置与隧道设计轴线得相对位置关系进行持续地监控测量,使盾构机能够根据设计路线精确地推动
日本株式会社得演算工房就就是为此而开发,该系统为使盾构机沿设计轴线(理论轴线)掘进提供所有重要得数据信息
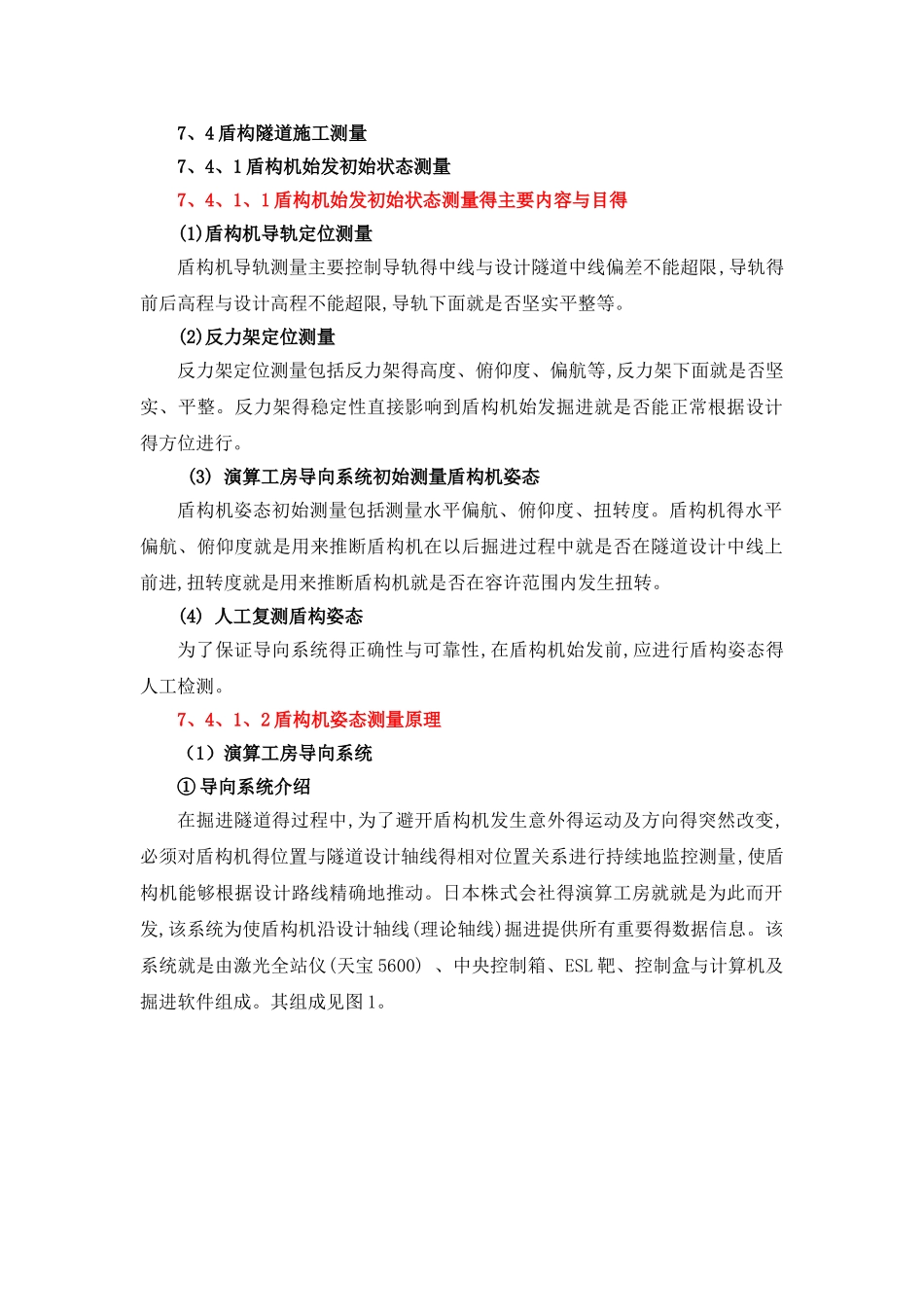
该系统就是由激光全站仪(天宝 5600) 、中央控制箱、ESL 靶、控制盒与计算机及掘进软件组成
其组成见图 1
图 1 盾构机导向系统组成② 导向基本原理洞内控制导线就是支持盾构机掘进导向定位得基础
激光全站仪安装在位于盾构机尾部右上侧管片得拖架上,后视一基准点(后视靶棱镜)定位后
全站仪自动掉过方向来,搜寻 ELS 靶, ELS 接收入射得激光定向光束,即可猎取激光站至ELS 靶间得方位角、竖直角,通过 ELS 棱镜与激光全站仪就可以测量出激光站至ELS 靶间得距离
盾构机得仰俯角与滚动