立体仓库控制系统一、实训目的:1、了解 A7003 型立体仓库系统工作原理与工作过程;2、进一步掌握 MicroLogix 1400 可编程控制器原理;3、掌握 RSLogix500 编程软件使用方法;4、掌握组态编程的控制思想及实现;5、掌握立体仓库的编程实现方法
二、实训的设备 A7003 立体仓库系统,电脑,MicroLogix 1400 编程器三、实训内容1、控制要求及控制原理1)控制要求:该立体仓库模拟系统可以模拟自动仓储系统,利用光电编码器及限位开关确定仓库及叉车的位置,从而可以实现仓库叉车系统可以从初始位置走到目标位置取货,然后将取得的货物再送到指定的位置
本次模拟立体仓库控制实训项目的基本控制要求为:(1)让叉车永远从初始的 1 位置开始运行(2)让叉车可以运行到目标位置,即可以实现 X 定位和 Y 定位(3)可以让叉车实现取货或者送货操作
即可以实现 Z 轴定位要求在本次实训中,利用 RSLINX 完成对系统的通信,利用 Rslogix500 软件完成对程序的编写
利用 RSVIEW32 软件完成对组态界面的在线控制及监控
在完成基本要求的前提,可以尝试一下控制要求
(1)让叉车永远从初始的 1 位置开始运行(2)让叉车可以运行到目标位置,即可以实现 X 定位和 Y 定位(3)可以让叉车实现取货操作
即可以实现 Z 轴定位(4)然后让叉车自动运行的送货的目标位置并完成送货操作
2)控制原理本实训项目核心的控制原理为定位原理
其具体的定位原理如下所述
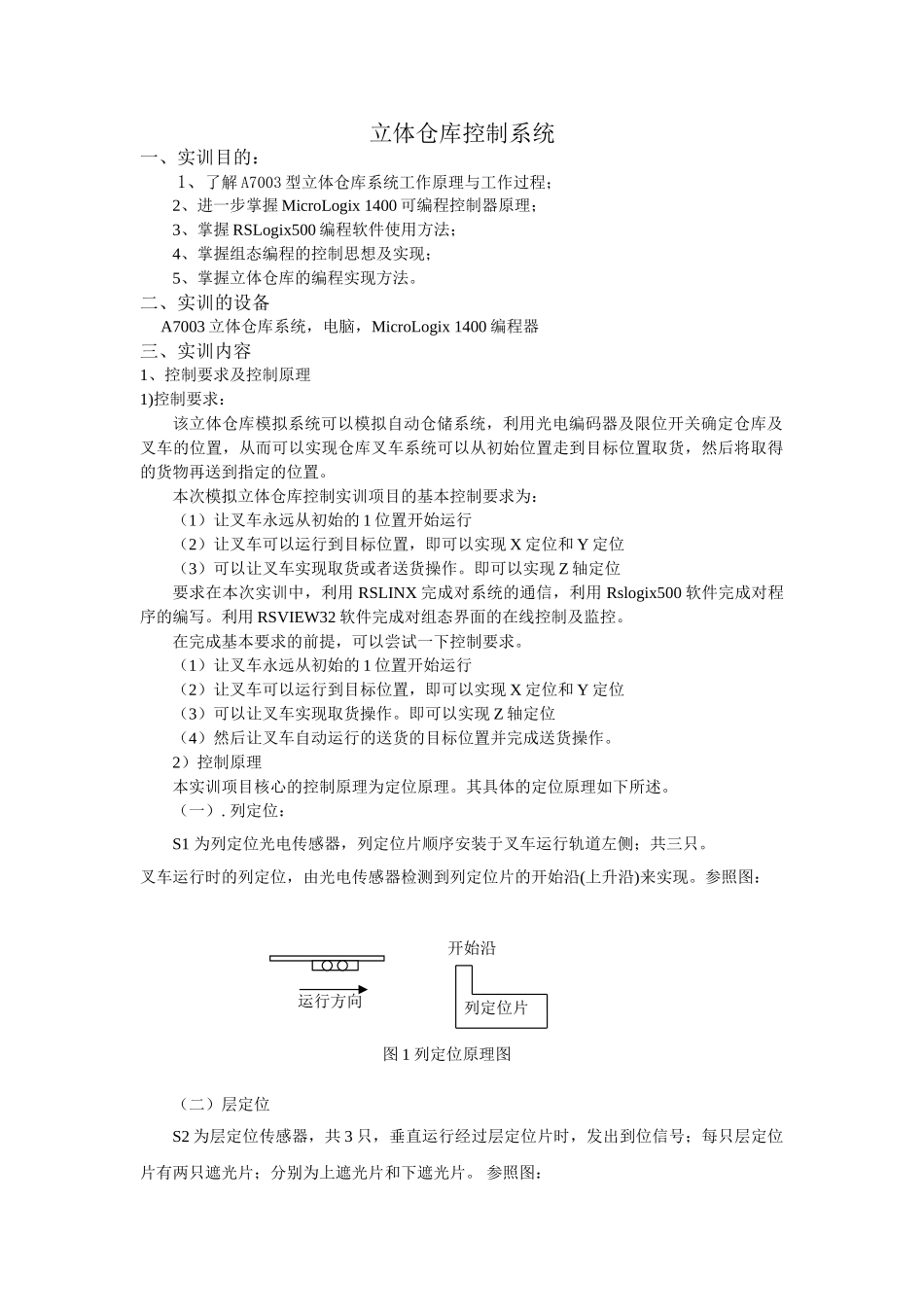
列定位: S1 为列定位光电传感器,列定位片顺序安装于叉车运行轨道左侧;共三只
叉车运行时的列定位,由光电传感器检测到列定位片的开始沿(上升沿)来实现
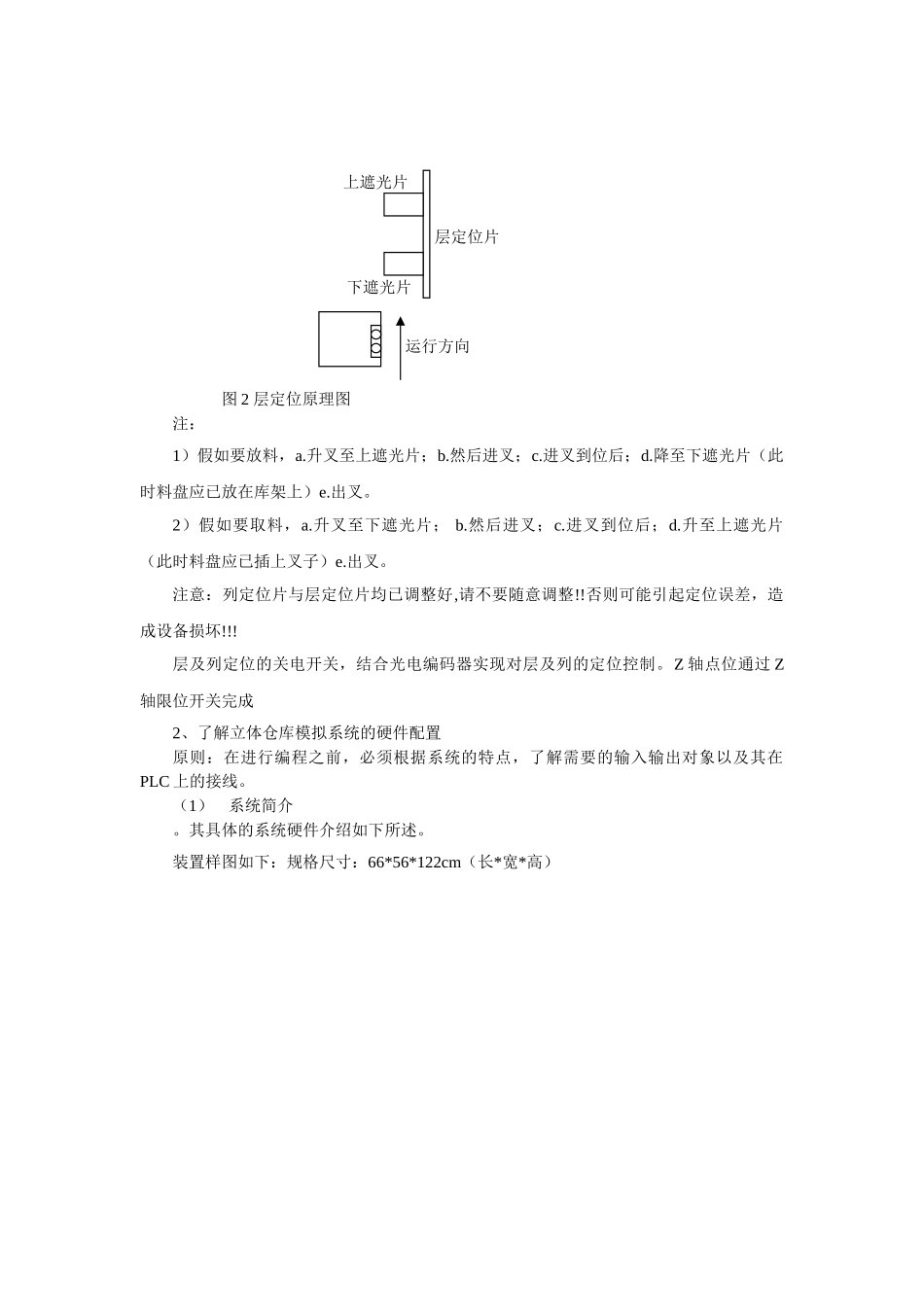
参照图:(二)层定位S2 为层定位传感器,共 3 只,垂直运行经过层定位片时,发出到位信号;每只层定位片有两只遮光片;分别为上遮光片和下遮光片