基于多传感器信息融合的数控机床故障诊断讨论1
引言数控机床具有加工柔性好、 加工精度高、 加工质量稳定、 生产率高等诸多特点, 但其结构和运行工况也很复杂, 一旦机床发生故障, 引起故障的因素众多, 有机械方面的, 有电气方面的, 同时同一种故障往往有不同的表现, 同一种症状又常常是几种故障共同作用的结果, 故障的多样性、 复杂性和各故障之间的复杂联系构成了数控机床故障诊断中的重点和难点
每个传感器都有一定的功能和测量范围, 单个传感器的数据从某个侧面反应被测对象或系统的情况, 难免带有一定的局限性
仅仅经过单一传感器的特征提取和诊断分析将无法成功完成对数控机床的故障诊断任务
因此多传感器数据融合技术显得尤为重要, 它能克服传感器使用的局限性和传感器信息的不准确性, 充分地、 综合地、 更有效地利用多传感器信息, 减少信息的模糊性, 增加决策可信度, 提高对数控机床的故障诊断的准确率
多传感器数据融合是一种重要的传感器信息处理方法, 它起源于 20世纪 70 年代, 最早被应用于军事领域, 用于解决目标识别与跟踪、 状态与身份估量、 态势和威胁估量等技术问题
它能充分利用不同时间与空间的多传感器数据资源, 在一定准则下进行分析、 综合、 支配和使用, 得到对被测对象的一致性解释和描述, 并做出相应的推断、 估量和决策
多传感器数据融合有多种算法, 其中, D-S 证据理论方法的应用最为广泛
本文主要建立了基于多传感器信息融合的数控机床二级故障诊断系统: 基于自适应加权算法的一级融合, 基于 D-S 证据理论的二级融合
然后利用某一论文中的数控机床的测量数据, 经过 MATLAB 软件对其进行分析计算, 最后得出结论
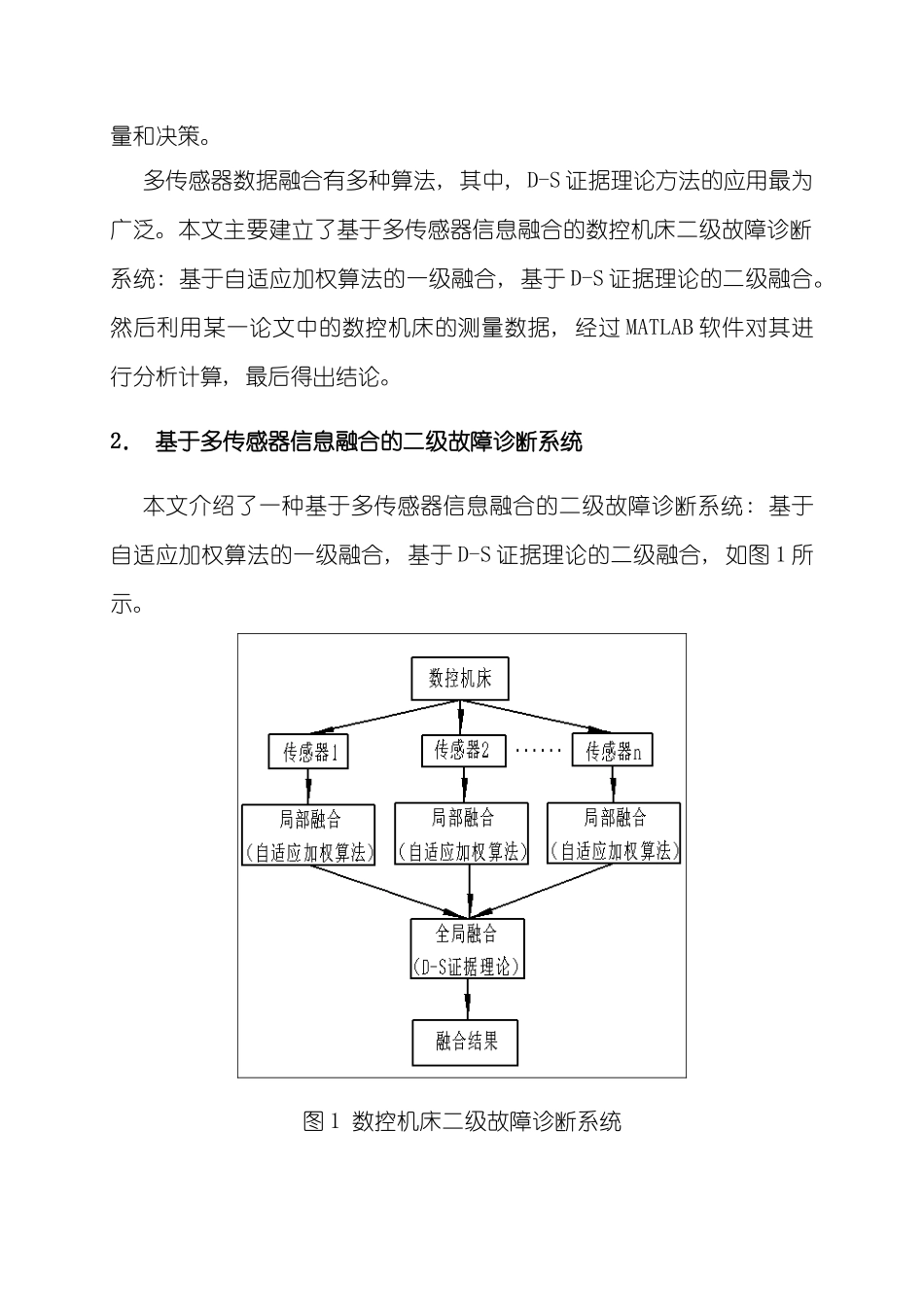
2. 基于多传感器信息融合的二级故障诊断系统本文介绍了一种基于多传感器信息融合的二级故障诊断系统: 基于自适应加权算法的一级融合, 基于 D-S 证据理论的二