自动控制原理自测题(a)一、填空题(30分)(其余每大题10分)1、自动控制系统的两种基本形式是控制和控制
2、闭环控制优点有和
3、在控制系统分析中对非线性系统在一定的条件下可近似为来分析
4、系统的输出量不仅与有关还与特性有关
5、频率分析法适用于系统
6、根轨迹起点由系统的决定,终点由决定
二、求f(t)之拉氏变换,设f(t)=Sin(5t+)
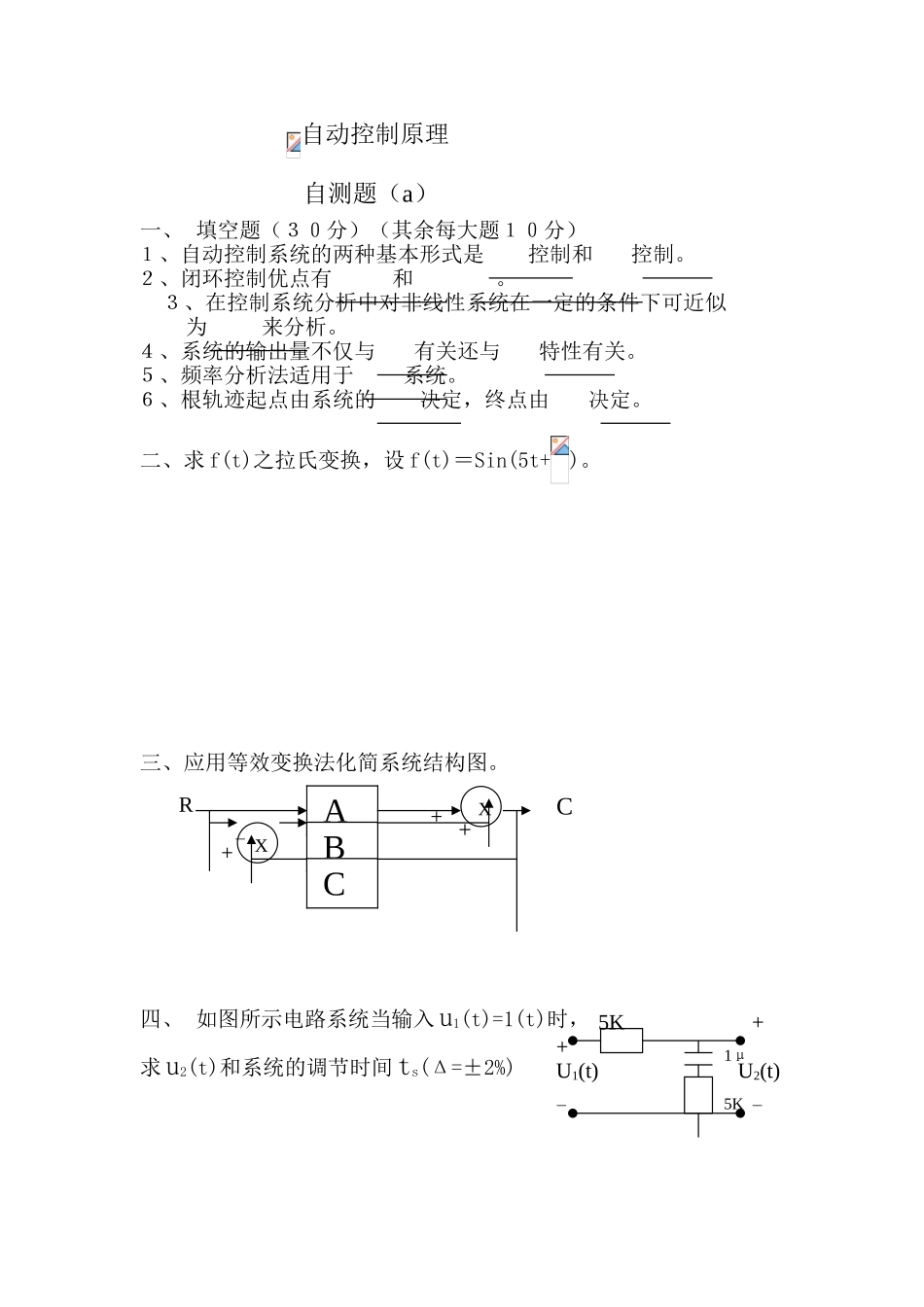
三、应用等效变换法化简系统结构图
四、如图所示电路系统当输入u1(t)=1(t)时,求u2(t)和系统的调节时间ts(Δ=±2%)XABCXRC+++-5K+U1(t)--U2(t)+1μ5K五、设系统的开环传递函数Go(s)=试用劳斯判据判别其稳定性
六、设系统传递函数,G(s)=,试画出其波特图
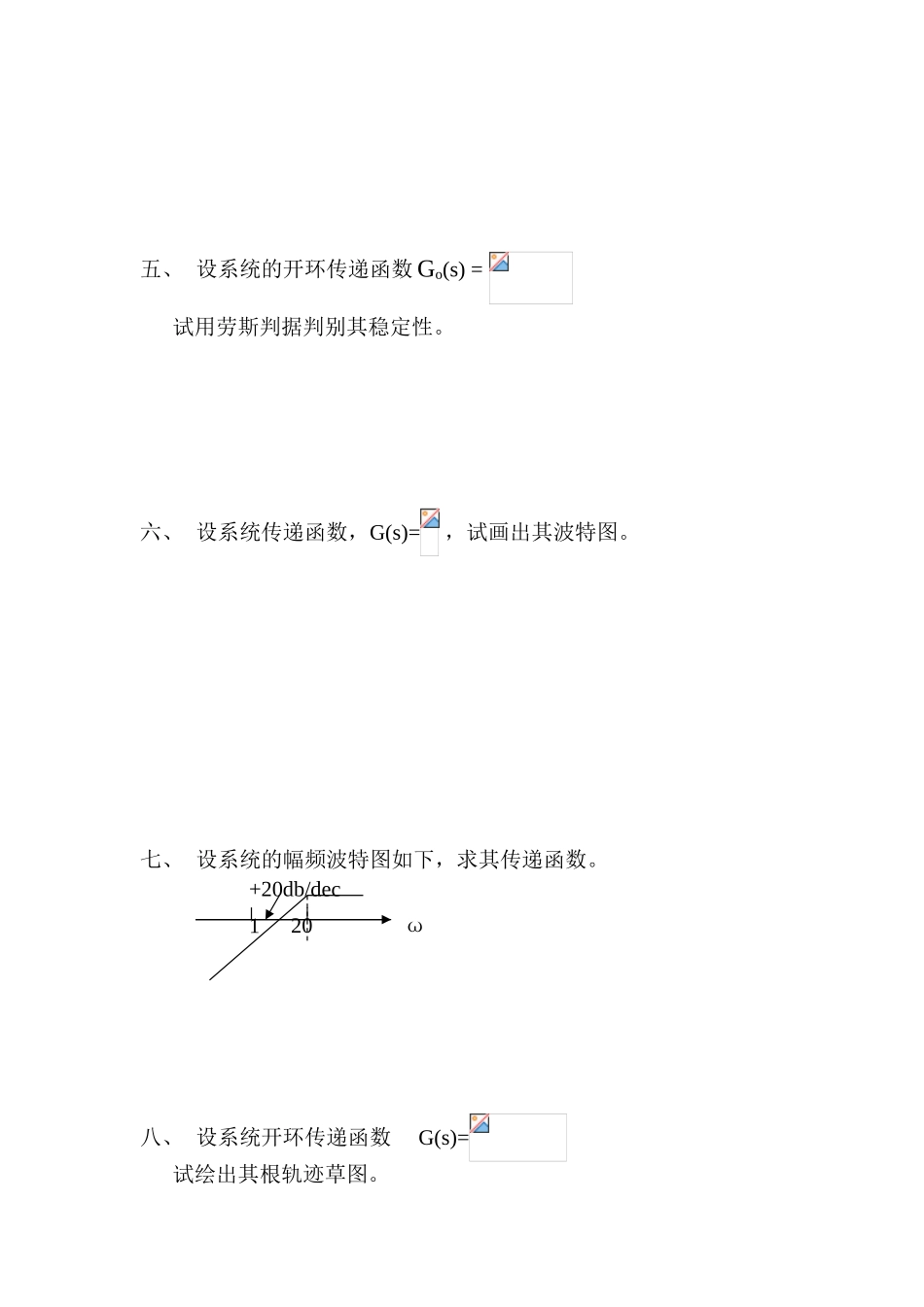
七、设系统的幅频波特图如下,求其传递函数
八、设系统开环传递函数G(s)=试绘出其根轨迹草图
120+20db/decω自测题(a)答案一、1(开环),(闭环)2(跟踪误差小),(抑制干扰能力强)3(线性系统)4(输入),(系统)5(线性定常)6(开环极点),(开环零点)二、解:f(t)=Sin5tCos+Cos5tSin=Sin5t+Cos5t∴F(s)=三、解四、解:=1-U2(s)=•U1(s)u2(t)=1(t)-e-100tts==0
04s五、解:劳斯表:S319S220200系统不稳定S1-1S0200六、解:G(s)=,为积分环节
RCL(dB)七、解:系统由一个微分环节和一个惯性环节构成
G(s)=Kω1=1
ω1=1,K=1,ω2=20,T==0
05G(s)=八、解:⑴二条根轨迹起点-P1=-1+j3,-P2=-1-j3终点:-j1=-2,-j2=∞⑵实轴上根轨迹⑶会合点坐标d=-5
15,会合角θ=±90º⑷出射角θc1=-162º,θc2=162º自动控制原理0-200-90°φωω-20dB/dec11