走迷宫机器人主要是基于自动导引小车(AGV——auto-guidedvehicle)的原理,实现小车识别路线,判断并自动规避障碍,选择正确的行进路线
导引方式采用与地面颜色有较大差别的导引线,使用反射式光电传感器感知导引线,障碍判断采用机械式传感器
驱动电机采用直流电机,电机控制方式为单向PWM开环控制
控制核心采用51单片机,控制系统与电路用光耦完全隔离以避免干扰
控制上采用分时复用技术,仅用一块单片机就实现了信号采集,路线判断,电机控制
该技术可以应用于无人工厂,仓库,服务机器人等领域
总体规划对于走迷宫小车控制系统设计主要有三个方面:一、控制电路设计;二、传感器选择以及安放位置设计;三、程序设计
从总的方面来考虑,传感器的使用数量应该尽量少以减少单片机的信号处理量,但是又必须能使小车行驶自如
控制电路要根据选用的电机和传感器来设计,主要考虑稳定性,抗干扰性
一、电路设计控制电路主要有电机驱动电路,单片机接口电路,电源电路三个部分
考虑到电机的起动电流和制动时比较大,会造成电源电压不稳定容易对单片机和传感器的工作产生干扰,所以,电机驱动电路和单片机以及传感器电路用光耦隔离
传感器的电源直接使用24V蓄电池,单片机的电源则通过7805将24V电源转换到5V
这里主要对驱动电路进行一下介绍:小车使用24V直流电机,对于这种小功率直流电机的调速方法一般有两种
(1)线性型使用功率三极管作为功率放大器的输出控制直流电机
线性型驱动的电路结构和原理简单,成本低,加速能力强,但功率损耗大,特别是低速大转距运行时,通过电阻R的电流大,发热厉害,损耗大
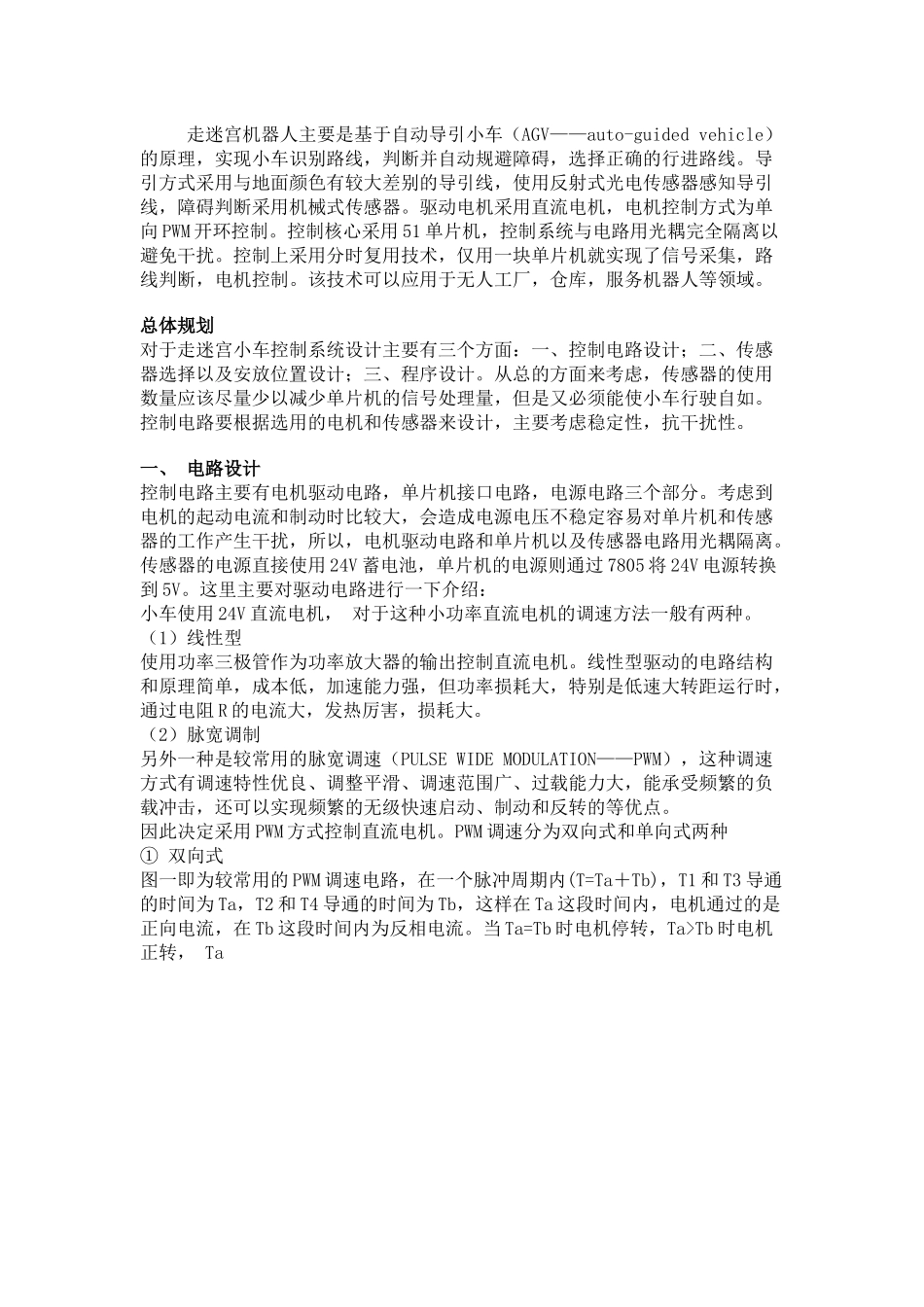
(2)脉宽调制另外一种是较常用的脉宽调速(PULSEWIDEMODULATION——PWM),这种调速方式有调速特性优良、调整平滑、调速范围广、过载能力大,能承受频繁的负载冲击,还可以实现频繁的无级快速启动、制动和反转的等优点