丹城中学灭火机器人共享方案(三)浙江省象山县丹城中学顾熙杰摘要:机器人灭火是中小学机器人比赛的常规项目,怎样提高机器人灭火的速度和稳定性是我们需要重点解决的问题
丹城中学机器人实验室自05年9月份建立以来,经过9个多月的实验,灭火机器人的研究取得了初步的成果,使用4、3、2、1的搜索顺序,灭火最好成绩分别为2
19秒和10
75秒,稳定成绩一般每个房间要延时半秒左右
虽然这个成绩和国内的超一流水平还有一定差距,但灭火回家的成功率超过%99,其中不乏有一些成功的算法,现作些介绍,和兄弟学校的师生共享研究成果,具体描述基于纳英特机器人平台
关键词:机器人灭火一)火焰检测传感器布局设计灭火机器人最少需要1个火焰检测传感器来完成灭火任务,当然使用烟雾传感器等也是可以的
1)1个火焰传感器的安装根据规则,蜡烛高度为15-20厘米,火焰高度是2-3厘米,所以如果安装一个火焰检测传感器的话,他的高度大概应该在18厘米左右
如果安装一组传感器来检测同一目标,重心应该在18厘米高度位置
2)2个火焰传感器的安装如果2个火焰传感器是主传感器,不但要用来检测有没有火焰,而且还要利用他们进行对光操作,那么一般如下安装
2个火焰传感器的高度都在18厘米左右
一般安装在机器人前面中心位置,2个传感器对称安装,一般向外偏转一定角度,2个传感器之间有一定的距离,使机器人发现火焰的可能性尽量大,同时对称的位置有利于对准火焰
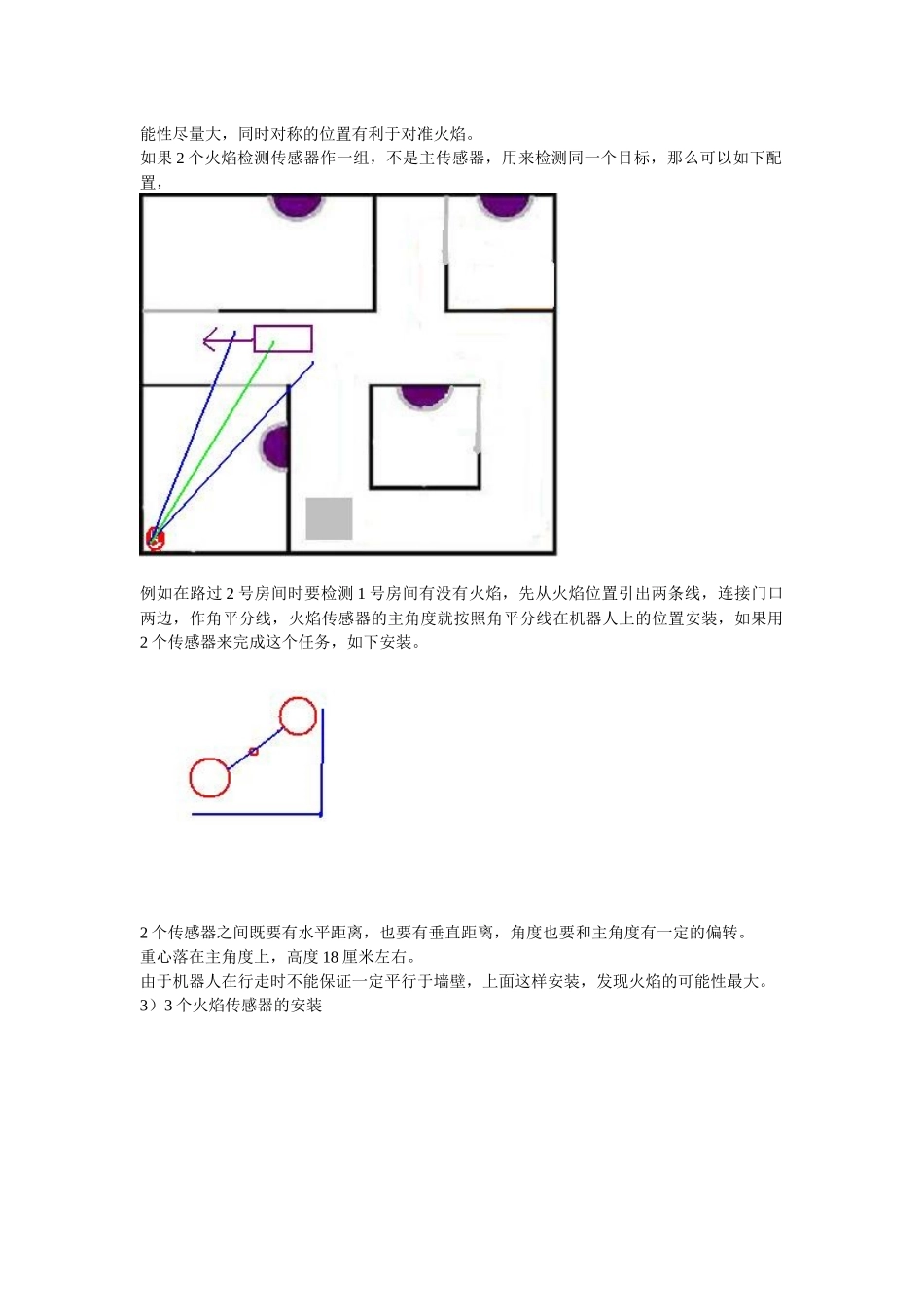
如果2个火焰检测传感器作一组,不是主传感器,用来检测同一个目标,那么可以如下配置,例如在路过2号房间时要检测1号房间有没有火焰,先从火焰位置引出两条线,连接门口两边,作角平分线,火焰传感器的主角度就按照角平分线在机器人上的位置安装,如果用2个传感器来完成这个任务,如下安装
2个传感器之间既要有水平距离,也要有垂直距离,角度也要和主角度有一定的偏转
重心落在主角度上