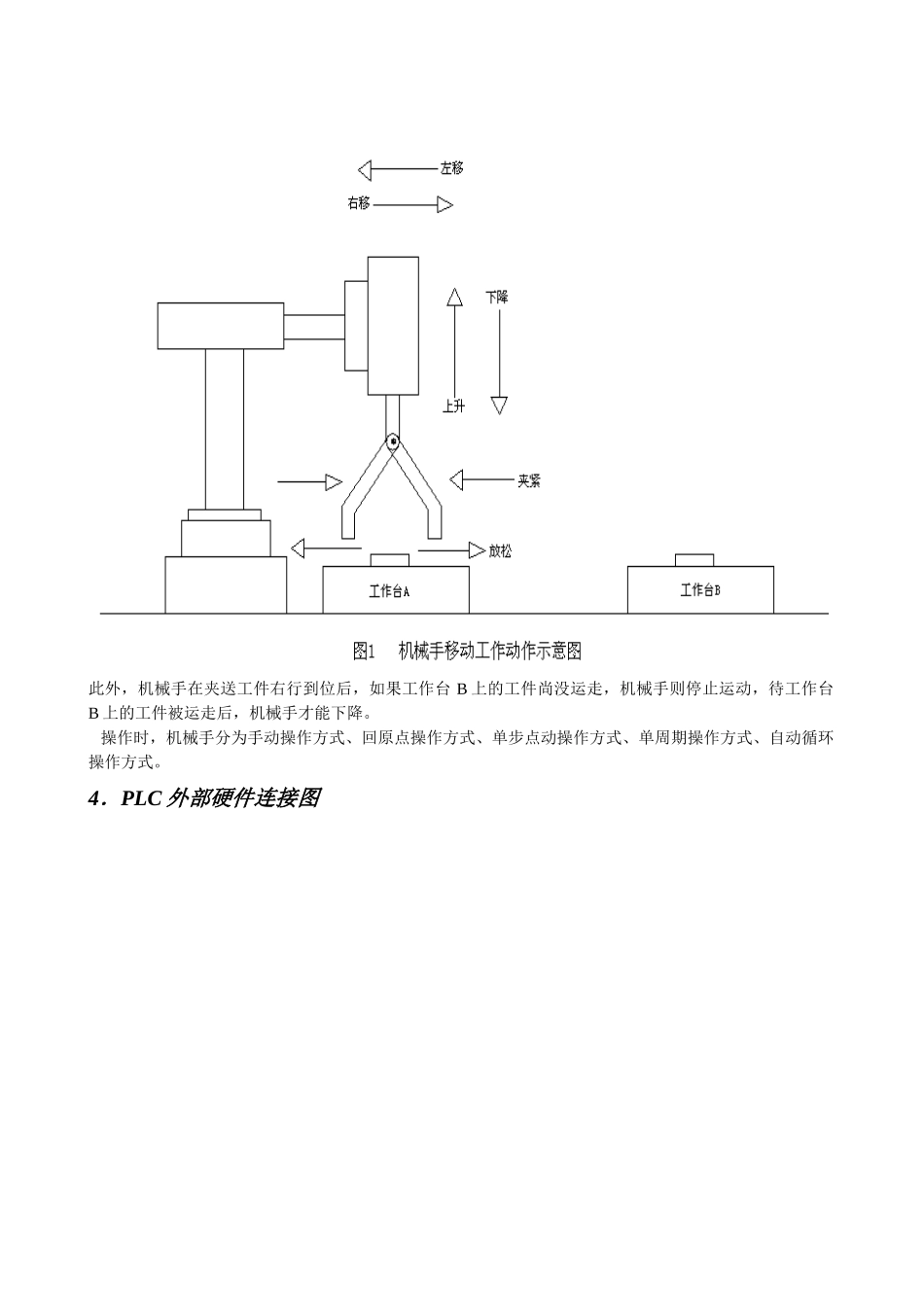
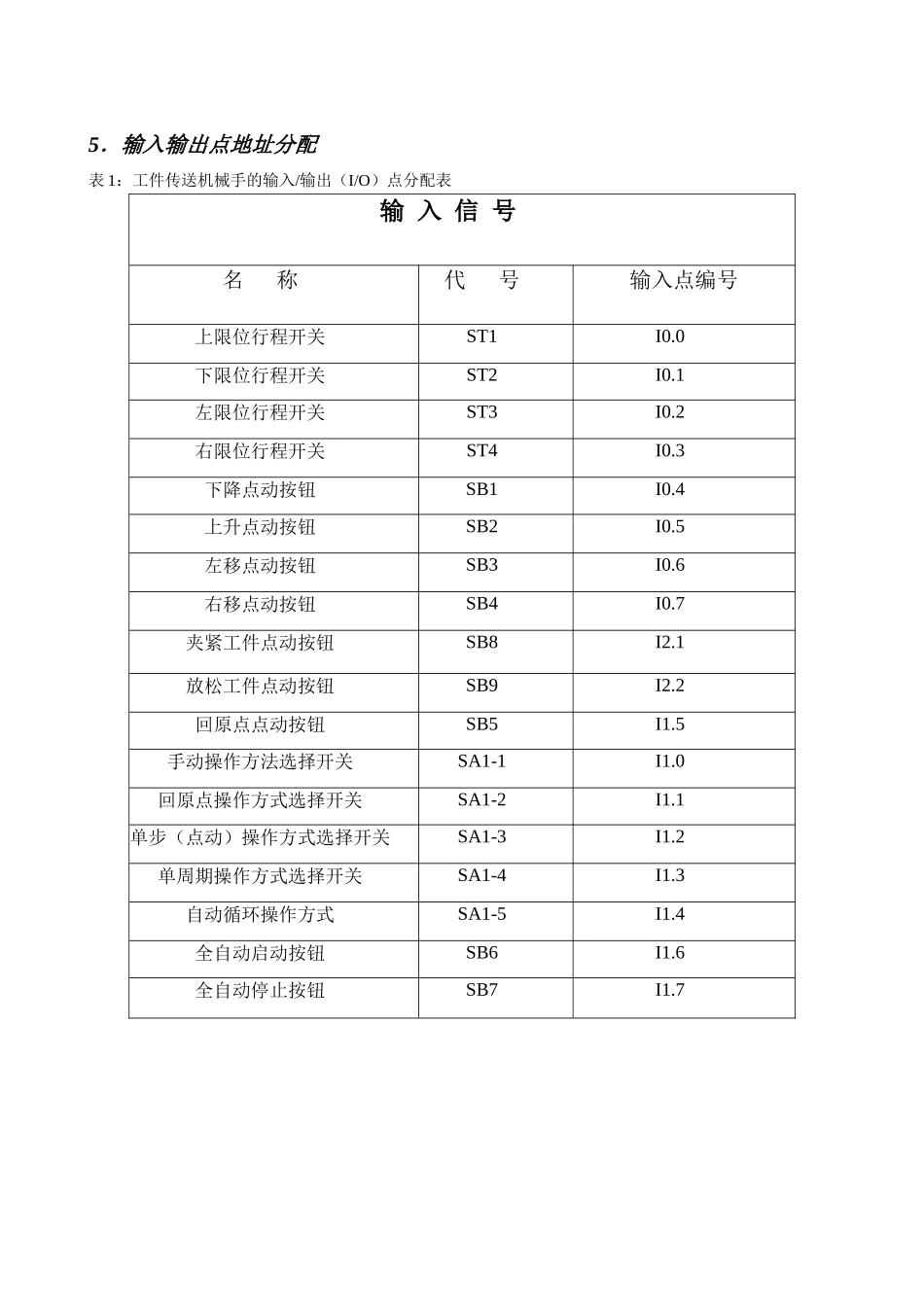
目录第1章设计课题...........................................................................................................................................1第2章设计目的...........................................................................................................................................1第3章课题任务的控制要求...................................................................................................................5第4章PLC外部硬件连接线.....................................................................................................................9第5章输入输出点地址分配.................................................................................................................10第6章顺序功能图....................................................................................................................................11第7章梯形图程序....................................................................................................................................12第8章指令语句表....................................................................................................................................12第9章模拟调试的过程和出现问题的分析....................................................................................15第10章调试程序所用的试验设备.......................................................................................................15第11章毕业设计的体会..........................................................................................................................18第12章参考文献.........................................................................................................................................193.课题任务的控制要求机械手移动工作动作示意图如图1所示。机械手需要将工件从工作台A移送至工作台B上,其动作过程为下降、上升、右移、再下降、在上升、左移。这些动作均由电磁阀控制液压系统来驱动完成。此外,机械手在夹送工件右行到位后,如果工作台B上的工件尚没运走,机械手则停止运动,待工作台B上的工件被运走后,机械手才能下降。操作时,机械手分为手动操作方式、回原点操作方式、单步点动操作方式、单周期操作方式、自动循环操作方式。4.PLC外部硬件连接图5.输入输出点地址分配表1:工件传送机械手的输入/输出(I/O)点分配表输入信号名称代号输入点编号上限位行程开关ST1I0.0下限位行程开关ST2I0.1左限位行程开关ST3I0.2右限位行程开关ST4I0.3下降点动按钮SB1I0.4上升点动按钮SB2I0.5左移点动按钮SB3I0.6右移点动按钮SB4I0.7夹紧工件点动按钮SB8I2.1放松工件点动按钮SB9I2.2回原点点动按钮SB5I1.5手动操作方法选择开关SA1-1I1.0回原点操作方式选择开关SA1-2I1.1单步(点动)操作方式选择开关SA1-3I1.2单周期操作方式选择开关SA1-4I1.3自动循环操作方式SA1-5I1.4全自动启动按钮SB6I1.6全自动停止按钮SB7I1.7表2:工件传送机械手的输入/输出(I/O)点分配表6.顺序功能图7.梯形图程序输出信号名称代号输出点编号上升电磁阀YV1Q0.0下降电磁阀YV2Q0.1左移电磁阀YV3Q0.2右移电磁阀YV4Q0.3夹紧电磁阀YV5Q0.4原点指示灯HLQ0.58.指令语句表ORGANIZATION_BLOCK主程序:OB1TITLE=程序注释BEGINNetwork1//原点指示灯LDI0.2ANQ0.1AI0.0=Q0.5Network2//手动操作方式选择开关LDI1.0JMP1Network3//回原点操作方式选择开关LDI1.1JMP2Network4//单步点动操作方式选择开关LDI1.2JMP3Network5//单周期操作方式选择开关LDI1.3JMP4Network6//自动循环操作方式选择开关LDI1.4JMP5Network7//手动操作方式LBL1Network8//夹紧与松开LDI2.1OQ0.4ANI2.2=Q0.4Network9//机械手下降LDI0.4ANI0.1=Q0.1Network10//机械手上升LDI0.5ANI0.0=Q0.0...