先进的机器人技术正在扩展外科医生所触及的极限
其中有受蠕虫启发制成的爬过肠道的胶囊,也有一块块吞下后,在身体中自行组装的系统
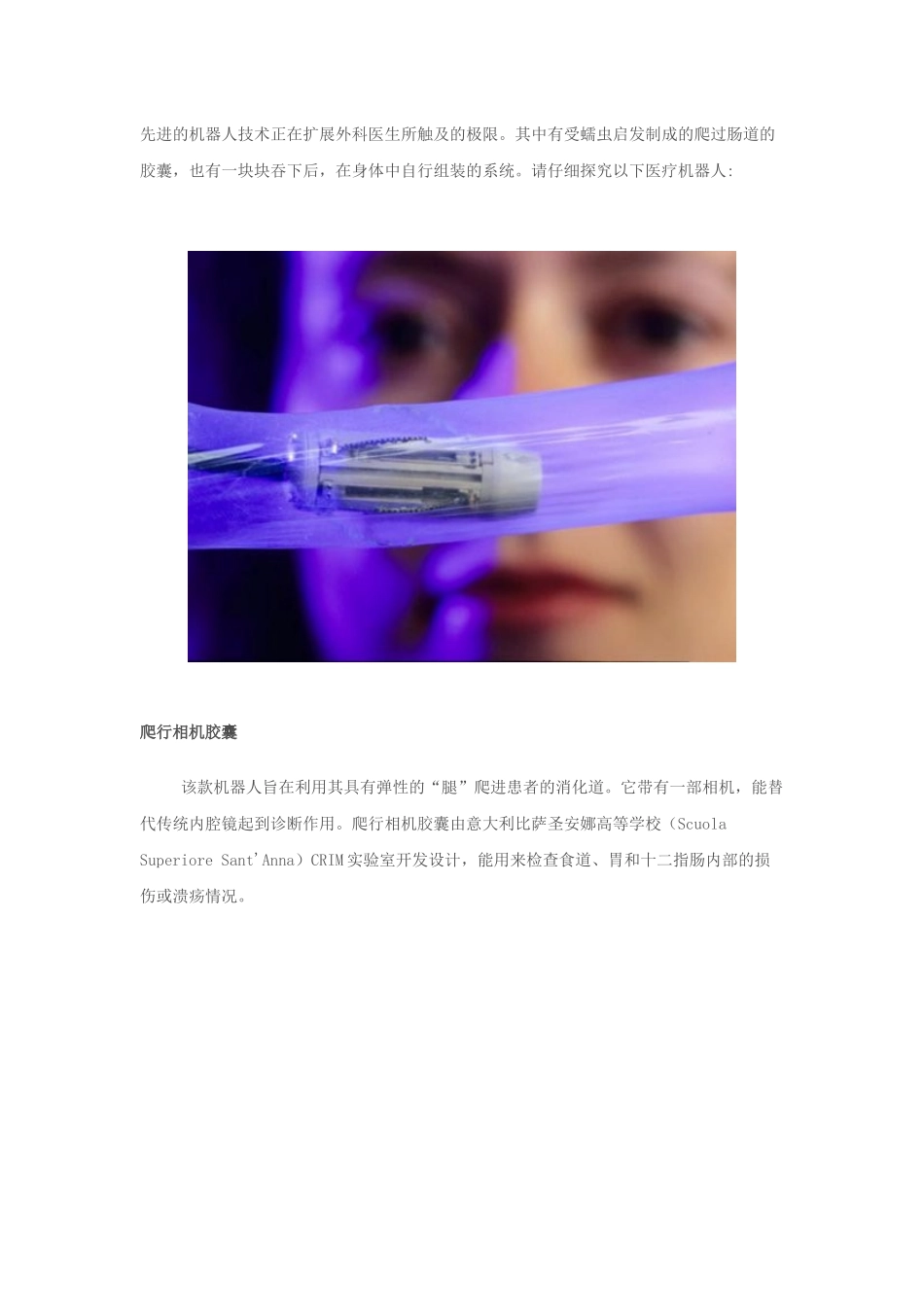
请仔细探究以下医疗机器人:爬行相机胶囊该款机器人旨在利用其具有弹性的“腿”爬进患者的消化道
它带有一部相机,能替代传统内腔镜起到诊断作用
爬行相机胶囊由意大利比萨圣安娜高等学校(ScuolaSuperioreSant'Anna)CRIM实验室开发设计,能用来检查食道、胃和十二指肠内部的损伤或溃疡情况
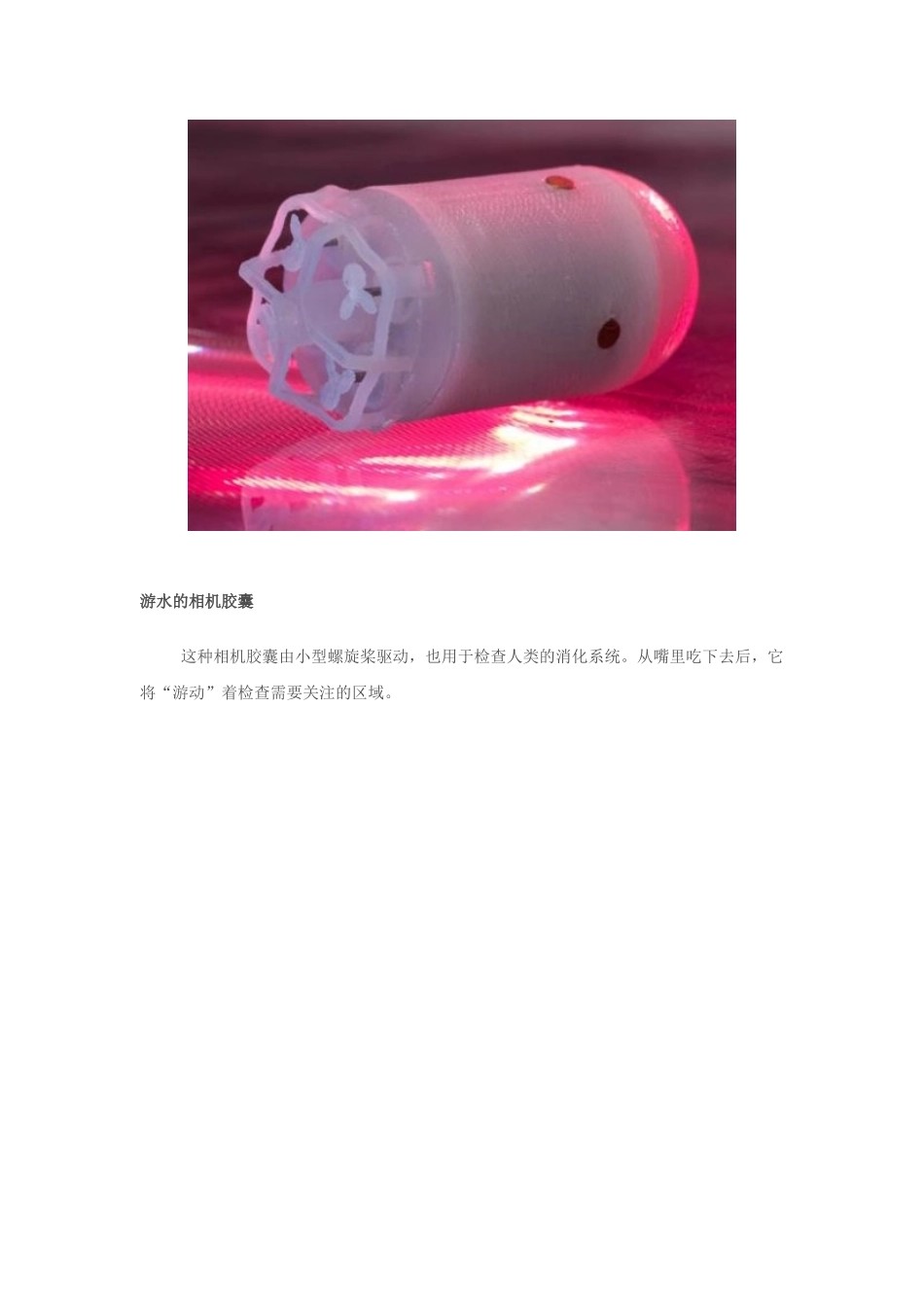
游水的相机胶囊这种相机胶囊由小型螺旋桨驱动,也用于检查人类的消化系统
从嘴里吃下去后,它将“游动”着检查需要关注的区域
远程诊断一位医生通过RP-7远距机器人和一名护士探讨病情
这款机器人连接着听诊器、检耳镜和超声扫描仪
它也有一个相机,还有一个屏幕,使患者和远方的医生都能看见对方,从而使远方的医生尽可能近似实地诊疗
肌肉机器人日本名古屋理研仿生控制研究中心研发的RI人是模范医院搬运工
RI人不仅有柔软安全的外型,其手臂和躯体上还有接触式传感器,使它能够小心的抱起或搬动患者
长远来看,它能接替人类陪护员去照顾老人或体弱者
机器人摄影师在微创手术(锁眼切口手术)中,FreeHand可以让外科医生运用头和脚的运动来控制所使用的腹腔镜相机
也就是说,他们能腾出手来实际执行手术
前列腺机器人前列腺机器人的任务是让外科医生能准确地以最小的力量切除肥大的前列腺
外科医生只需指定需要剥离的部分,无需进一步干预,机器人就能自动将其切除
能吞下去的机器人患者可以一块块地把ARES机器人(即“可重构装配腔内手术系统”)吞进去,或者由医生通过自然的小孔一块块插进人体
然后,它们会在身体里自行组装起来
其目的是让外科手术在几乎没有外部切口的情况下得以实施
患者要吞下十五块不同的机器人模块,它们能滑到体内有病的地方
一旦到达目的地,机器人部件就会重新组装成一个能够实施手术的较大器