131415161718192021222324129876543121110LNBACOMN/CCN/O主电源RS485通讯继电器输出124VDC远程复位-+一C+NCNO继电器触点输出2NONC继电器触点输出3+C一+-模拟量输入涂胶机器人过程控制仪表WEST8010安装与配置设备维修技术档案系列资料该表本来是为温度控制设计的仪表
但由于接口采用了标准的形式,所以也可以用于其他过程控制
在总装车间的涂胶机器人用于控制压力
该表在安装后需要做初始配置,下面简单介绍其基本方法
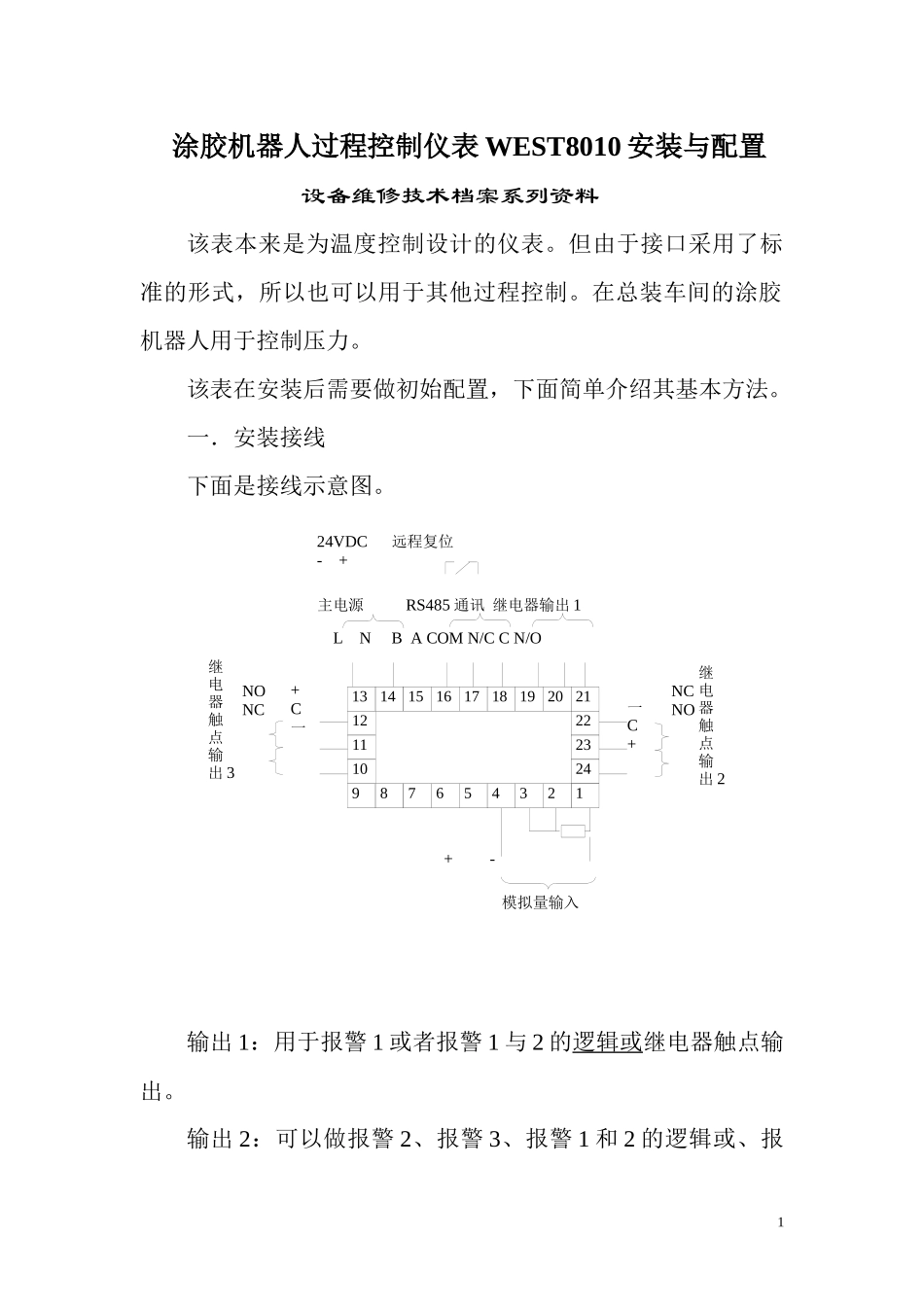
一.安装接线下面是接线示意图
输出1:用于报警1或者报警1与2的逻辑或继电器触点输出
输出2:可以做报警2、报警3、报警1和2的逻辑或、报1警2和3的逻辑或、报警1和3的逻辑或的继电器触点输出
也可以做一个采样器(RECORDER)的直流输出
输出3:可以做报警2、报警3、报警1和2的逻辑或、报警2和3的逻辑或、报警1和3的逻辑或的继电器触点输出
也可以做一个传感器电源输出
电源有两种版本:96-264VAC和24VAC/VDC
二.跳线设置(一)、模拟量输入类型跳线设置可以利用CPU板右上角跳线设置四种输入方式:1.代码:Z1---
RTD或直流mV
2.代码:Z2---
3.代码:Z3---
4.代码:Z4---
(二)、输出2的跳线设置当做采样器输出时,在输出板2上跳线设置
1.代码Z--3-:DC(0-10V)
2.代码Z--4-:DC(0-20mA)
3.代码Z--5-:DC(0-5V)
4.代码Z--7-:DC(4-20mA)
三.模式配置这个配置一般在机床出厂时做,用户轻易不要做这个配置
(一)、修改方法:21.在送电时,连续按上箭头和滚动键六秒,进入该配置界面
此时,设定(SET)指