经过50多年的发展,人工智能已形成极广泛的研究领域,并且取得了许多令人瞩目的成就[1]
人工智能也称机器智能,是一门研究人类智能机理和如何用计算机模拟人类智能活动的学科
智能机器人技术综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,集成了多学科的发展成果,代表高技术的发展前沿[2]
智能机器人的研究,大大促进了人工智能思想和技术的进步,渐渐成为一个备受关注的分支领域,各种智能机器人比赛也成为国内外广泛推广和发展的一种竞技项目
智能机器人灭火比赛由美国三一学院于1994年创办,目前已成为全球规模最大、普及程度最高的全自主智能机器人大赛之一
硬件电路是智能灭火机器人整体的核心骨架,其参数性能及设计的合理性直接决定了智能灭火机器人的性能
本文完成了基于ARM9内核[3]的智能灭火机器人的硬件电路的设计与实现
1硬件电路的总体设计灭火比赛的任务是在一封闭房间模型中,随机在其中一个房间里放置蜡烛代替的火源,要求机器人在尽可能短的时间里无碰撞地找到火源并完成灭火
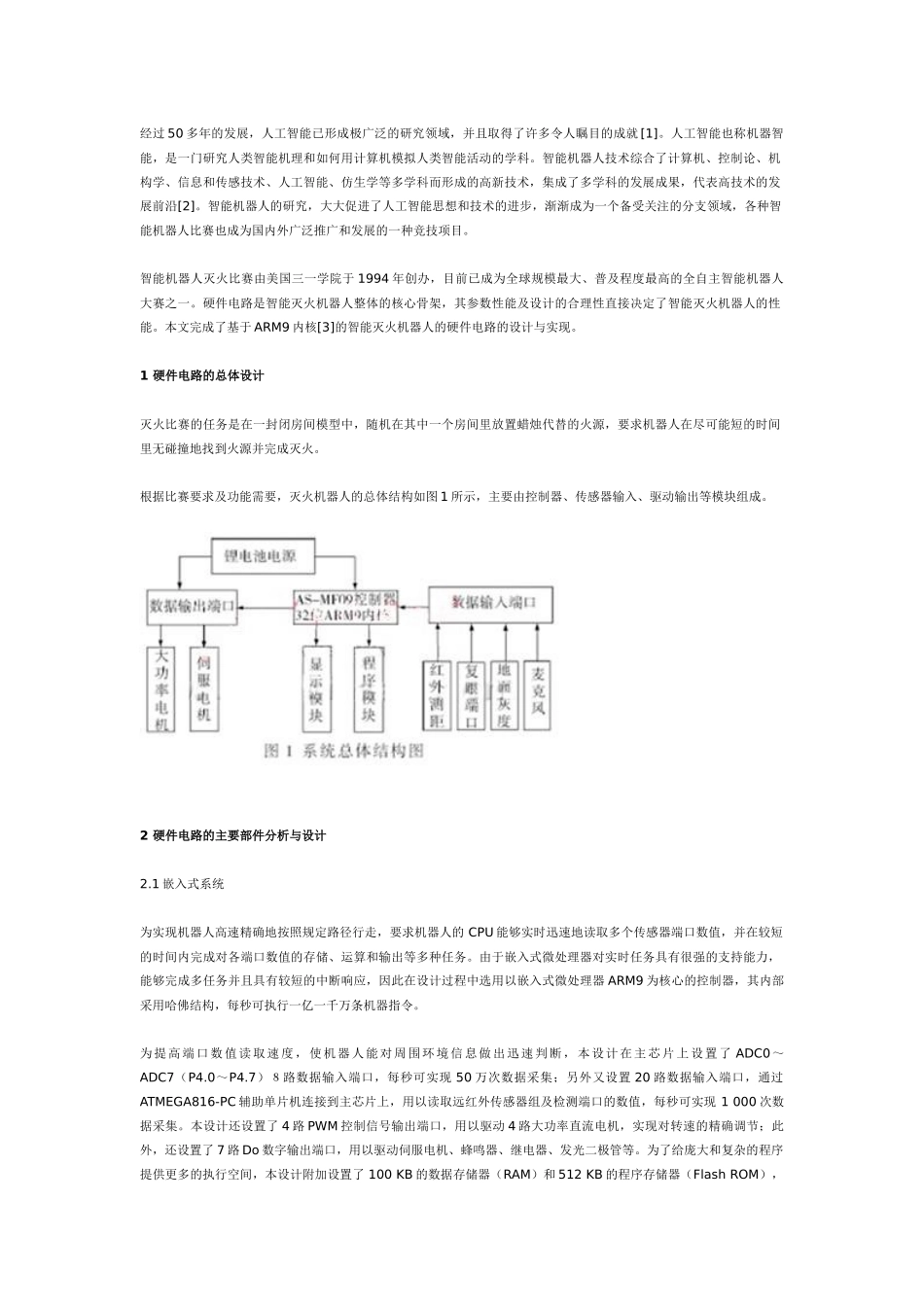
根据比赛要求及功能需要,灭火机器人的总体结构如图1所示,主要由控制器、传感器输入、驱动输出等模块组成
2硬件电路的主要部件分析与设计2
1嵌入式系统为实现机器人高速精确地按照规定路径行走,要求机器人的CPU能够实时迅速地读取多个传感器端口数值,并在较短的时间内完成对各端口数值的存储、运算和输出等多种任务
由于嵌入式微处理器对实时任务具有很强的支持能力,能够完成多任务并且具有较短的中断响应,因此在设计过程中选用以嵌入式微处理器ARM9为核心的控制器,其内部采用哈佛结构,每秒可执行一亿一千万条机器指令
为提高端口数值读取速度,使机器人能对周围环境信息做出迅速判断,本设计在主芯片上设置了ADC0~ADC7(P4
7)8路数据输入端口,每秒可实现50万次数据采集;另外又设置20路数据输