简易智能电动车(E 题)摘要:简易智能电动车由一个电动玩具车改造而成
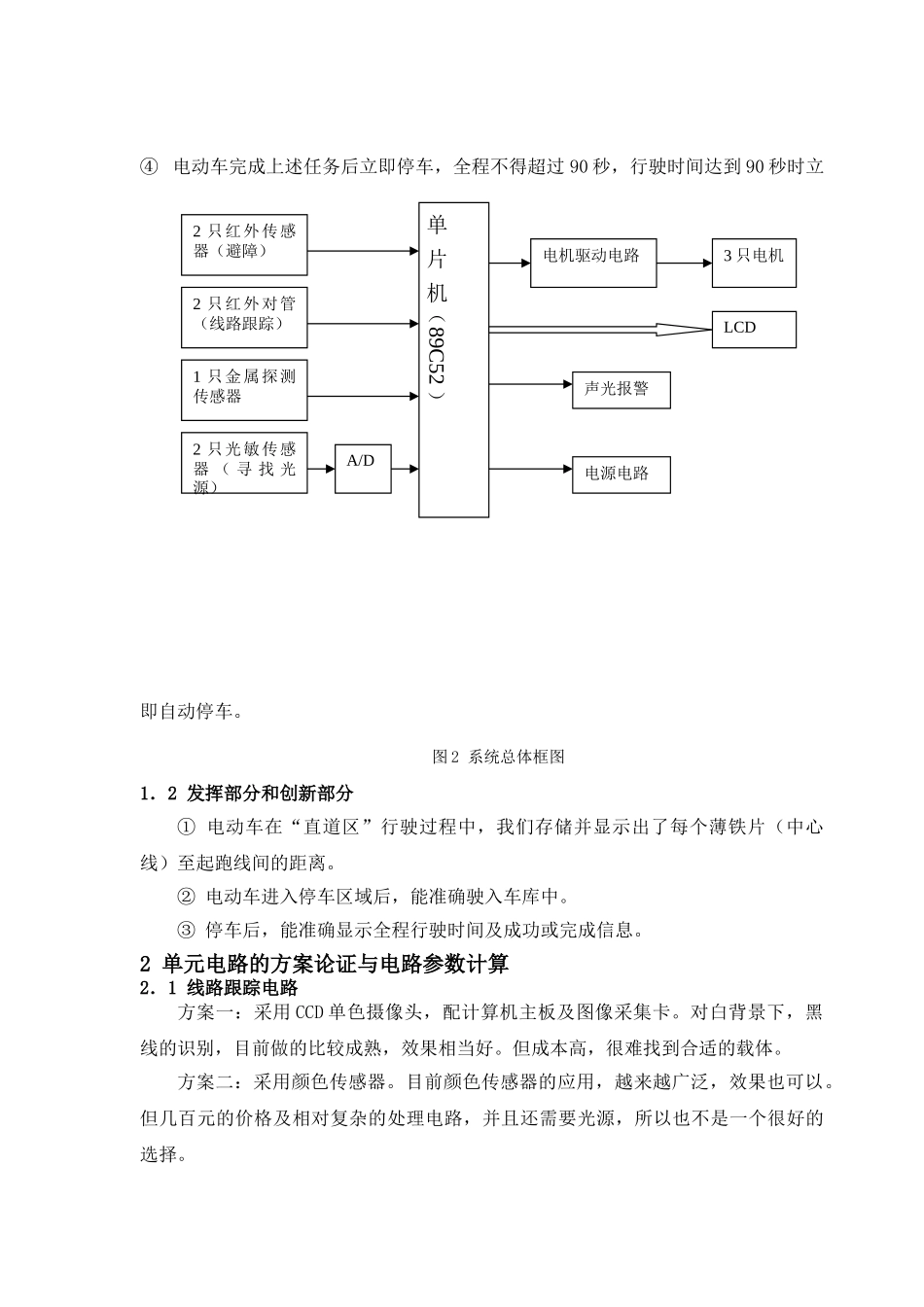
系统的控制部分以单片机为核心,通过对前向通道各种传感器信号的采集、处理,较好地实现了后向通道驱动及转向电机的运动控制和相关信息的处理、显示和声光报警
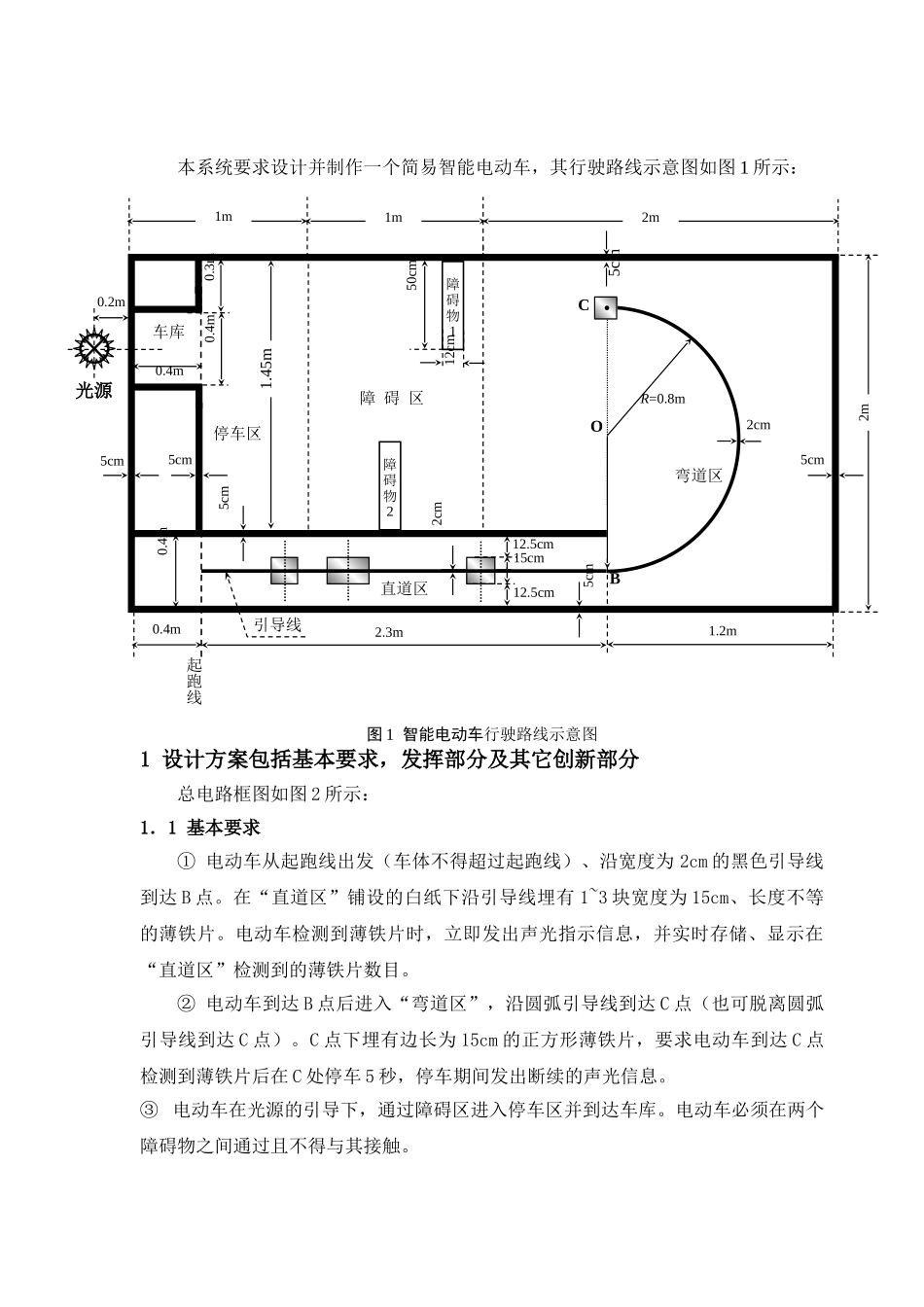
关键词:电动车,路径跟踪,避障,光源引导本系统要求设计并制作一个简易智能电动车,其行驶路线示意图如图 1 所示:图 1 智能电动车行驶路线示意图1 设计方案包括基本要求,发挥部分及其它创新部分总电路框图如图 2 所示:1.1 基本要求① 电动车从起跑线出发(车体不得超过起跑线)、沿宽度为 2cm 的黑色引导线到达 B 点
在“直道区”铺设的白纸下沿引导线埋有 1~3 块宽度为 15cm、长度不等的薄铁片
电动车检测到薄铁片时,立即发出声光指示信息,并实时存储、显示在“直道区”检测到的薄铁片数目
② 电动车到达 B 点后进入“弯道区”,沿圆弧引导线到达 C 点(也可脱离圆弧引导线到达 C 点)
C 点下埋有边长为 15cm 的正方形薄铁片,要求电动车到达 C 点检测到薄铁片后在 C 处停车 5 秒,停车期间发出断续的声光信息
③ 电动车在光源的引导下,通过障碍区进入停车区并到达车库
电动车必须在两个障碍物之间通过且不得与其接触
障碍物1障碍物21m1m2mR=0
8mCB5cm起跑线1
4m5cm5cm2cm5cm5cm2cm停车区0
4m12cm光源1
3m直道区弯道区2mO50cm障 碍 区引导线车库0
4m15cm12
5cm5cm④ 电动车完成上述任务后立即停车,全程不得超过 90 秒,行驶时间达到 90 秒时立即自动停车
图 2 系统总体框图1.2 发挥部分和创新部分① 电动车在“直道区”行驶过程中,我们存储并显示出了每个薄铁片(中心线)至起跑线间的距离
② 电动车进入停车区域后,能准确驶入车库中