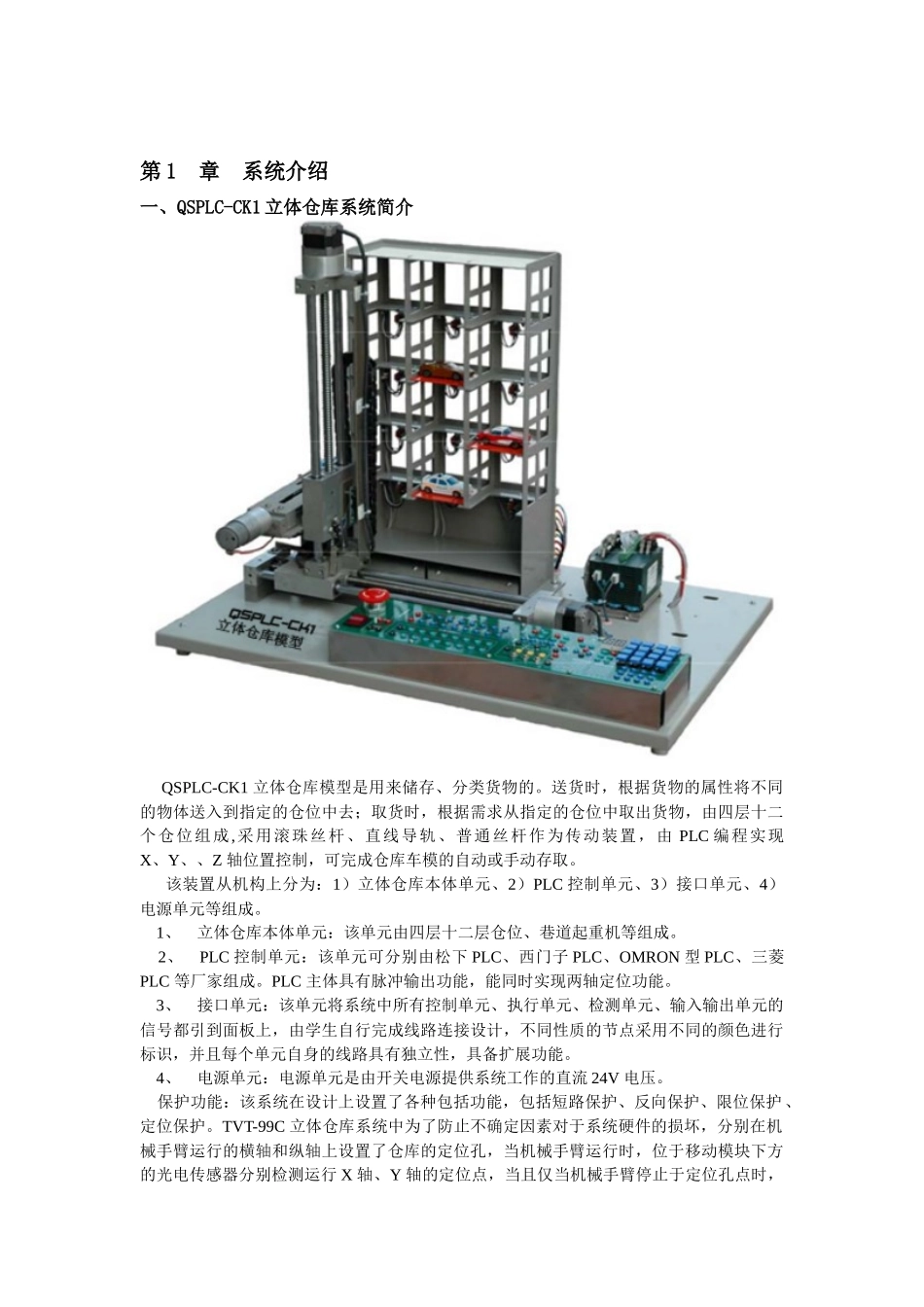
第1章系统介绍一、QSPLC-CK1立体仓库系统简介QSPLC-CK1立体仓库模型是用来储存、分类货物的
送货时,根据货物的属性将不同的物体送入到指定的仓位中去;取货时,根据需求从指定的仓位中取出货物,由四层十二个仓位组成,采用滚珠丝杆、直线导轨、普通丝杆作为传动装置,由PLC编程实现X、Y、、Z轴位置控制,可完成仓库车模的自动或手动存取
该装置从机构上分为:1)立体仓库本体单元、2)PLC控制单元、3)接口单元、4)电源单元等组成
1、立体仓库本体单元:该单元由四层十二层仓位、巷道起重机等组成
2、PLC控制单元:该单元可分别由松下PLC、西门子PLC、OMRON型PLC、三菱PLC等厂家组成
PLC主体具有脉冲输出功能,能同时实现两轴定位功能
3、接口单元:该单元将系统中所有控制单元、执行单元、检测单元、输入输出单元的信号都引到面板上,由学生自行完成线路连接设计,不同性质的节点采用不同的颜色进行标识,并且每个单元自身的线路具有独立性,具备扩展功能
4、电源单元:电源单元是由开关电源提供系统工作的直流24V电压
保护功能:该系统在设计上设置了各种包括功能,包括短路保护、反向保护、限位保护、定位保护
TVT-99C立体仓库系统中为了防止不确定因素对于系统硬件的损坏,分别在机械手臂运行的横轴和纵轴上设置了仓库的定位孔,当机械手臂运行时,位于移动模块下方的光电传感器分别检测运行X轴、Y轴的定位点,当且仅当机械手臂停止于定位孔点时,对应的Z轴才能进行取货和移货的动作
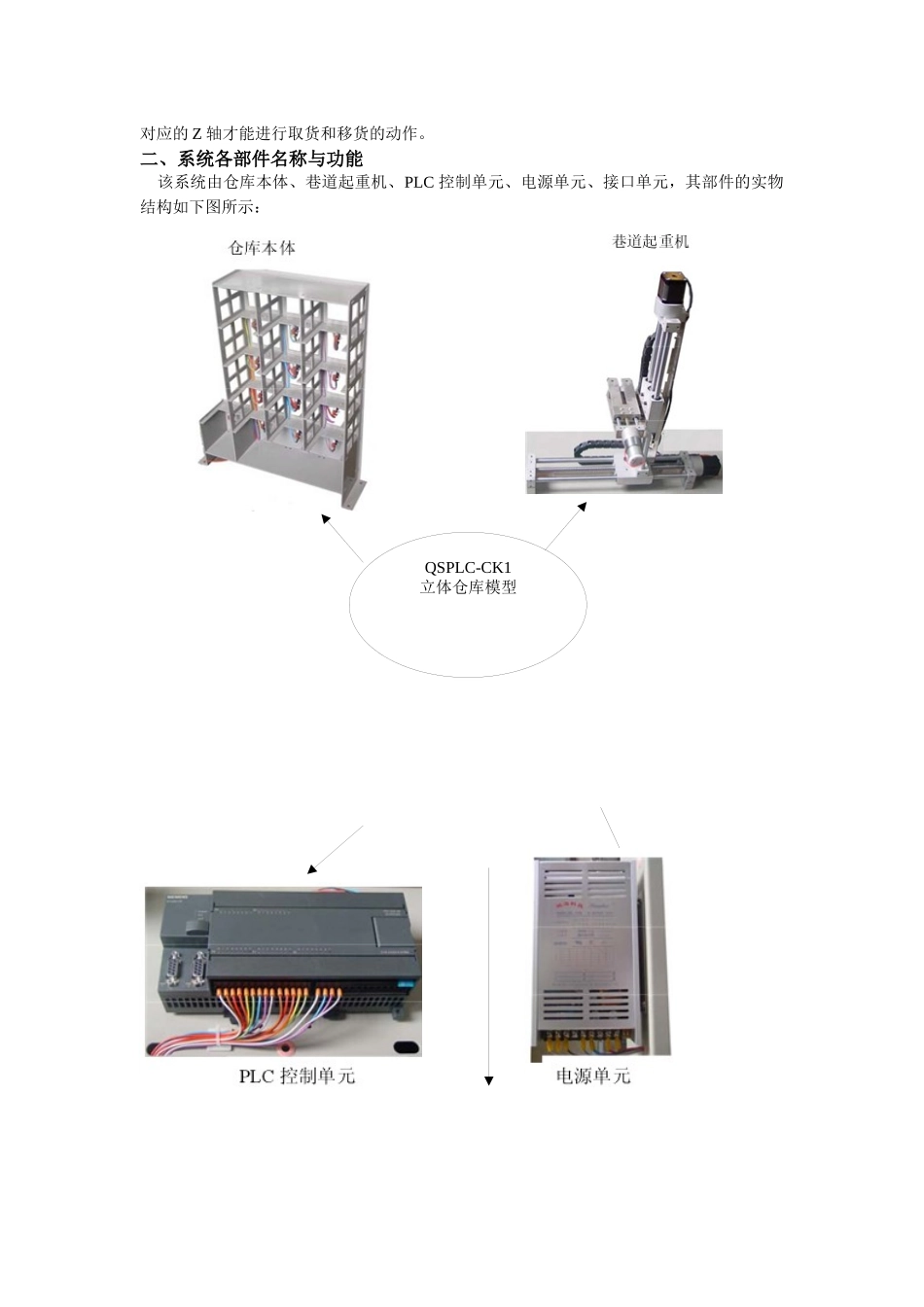
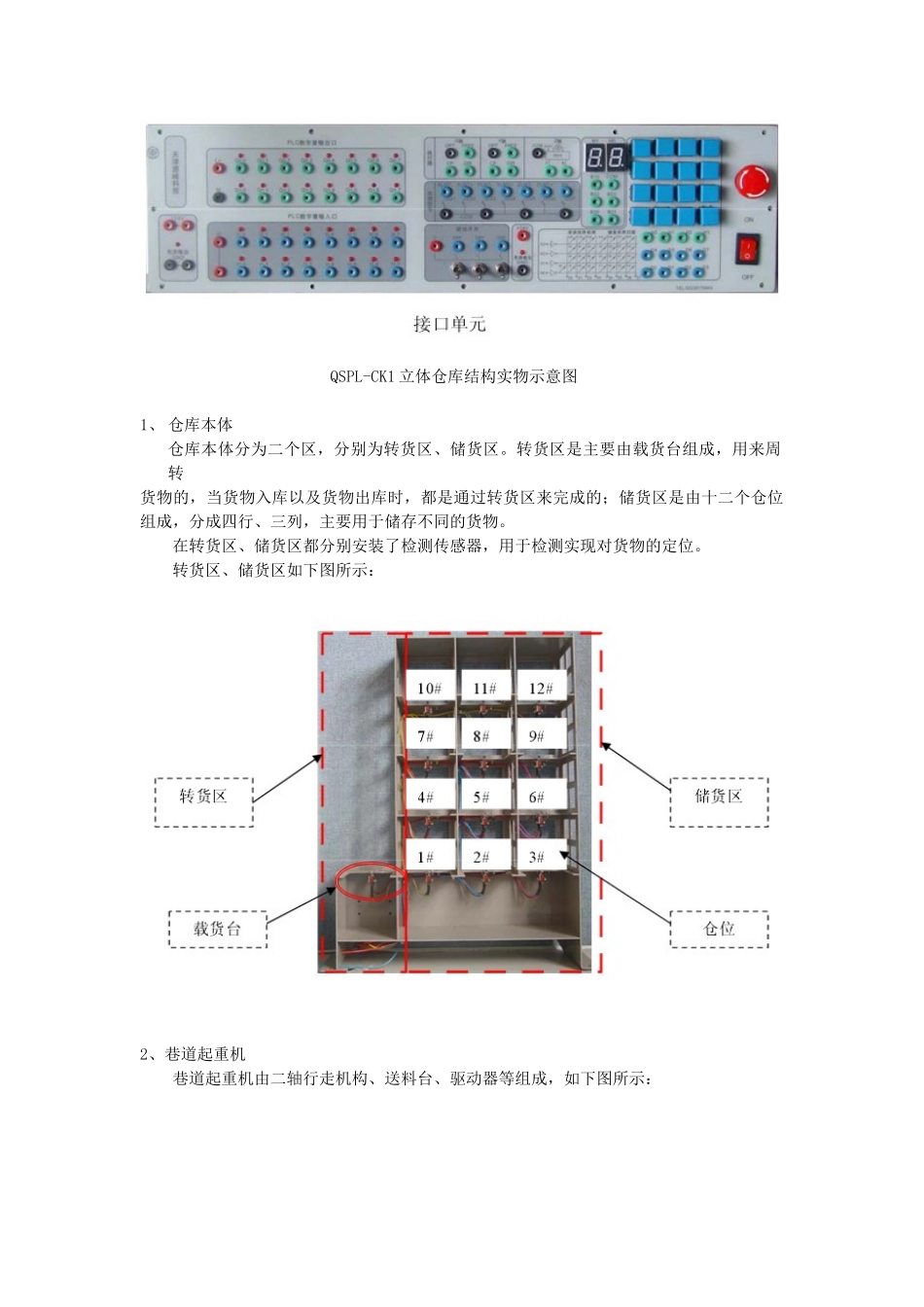
二、系统各部件名称与功能该系统由仓库本体、巷道起重机、PLC控制单元、电源单元、接口单元,其部件的实物结构如下图所示:QSPLC-CK1立体仓库模型QSPL-CK1立体仓库结构实物示意图1、仓库本体仓库本体分为二个区,分别为转货区、储货区
转货区是主要由载货台组成,用来周转货物的,当货物入库以及货物出库时,都是通过转