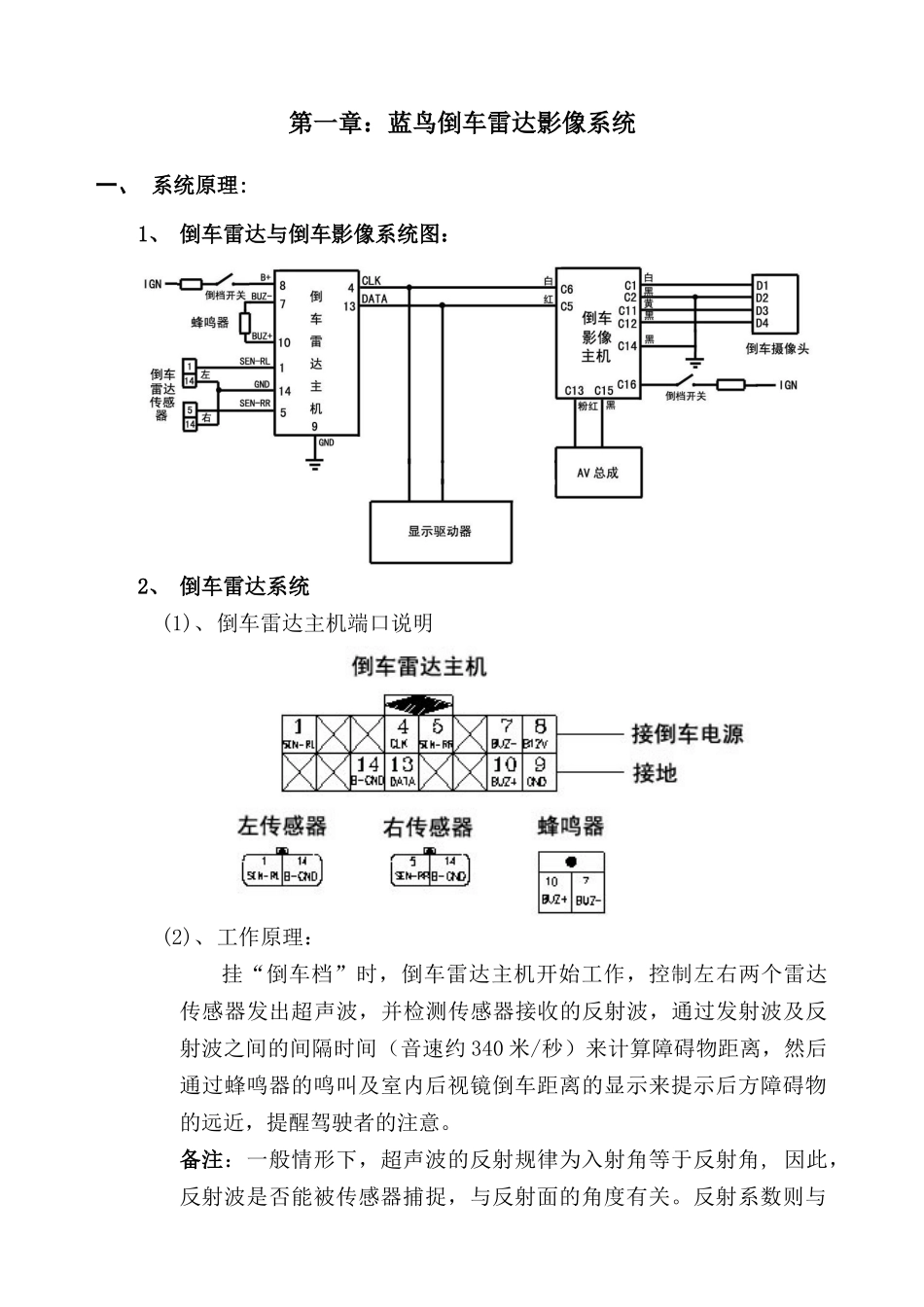
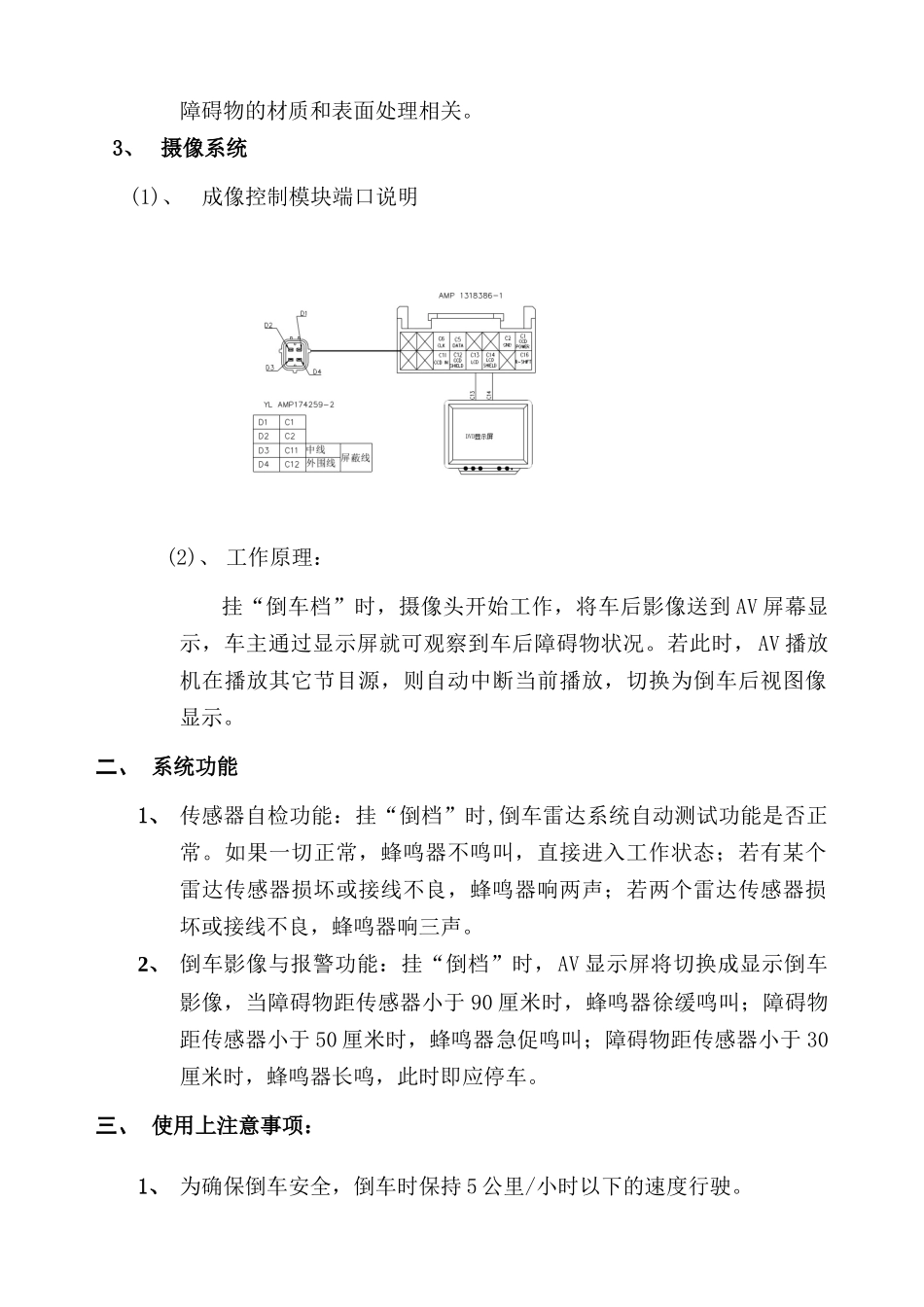
第一章:蓝鸟倒车雷达影像系统一、系统原理:1、倒车雷达与倒车影像系统图:2、倒车雷达系统(1)、倒车雷达主机端口说明(2)、工作原理:挂“倒车档”时,倒车雷达主机开始工作,控制左右两个雷达传感器发出超声波,并检测传感器接收的反射波,通过发射波及反射波之间的间隔时间(音速约340米/秒)来计算障碍物距离,然后通过蜂鸣器的鸣叫及室内后视镜倒车距离的显示来提示后方障碍物的远近,提醒驾驶者的注意
备注:一般情形下,超声波的反射规律为入射角等于反射角,因此,反射波是否能被传感器捕捉,与反射面的角度有关
反射系数则与障碍物的材质和表面处理相关
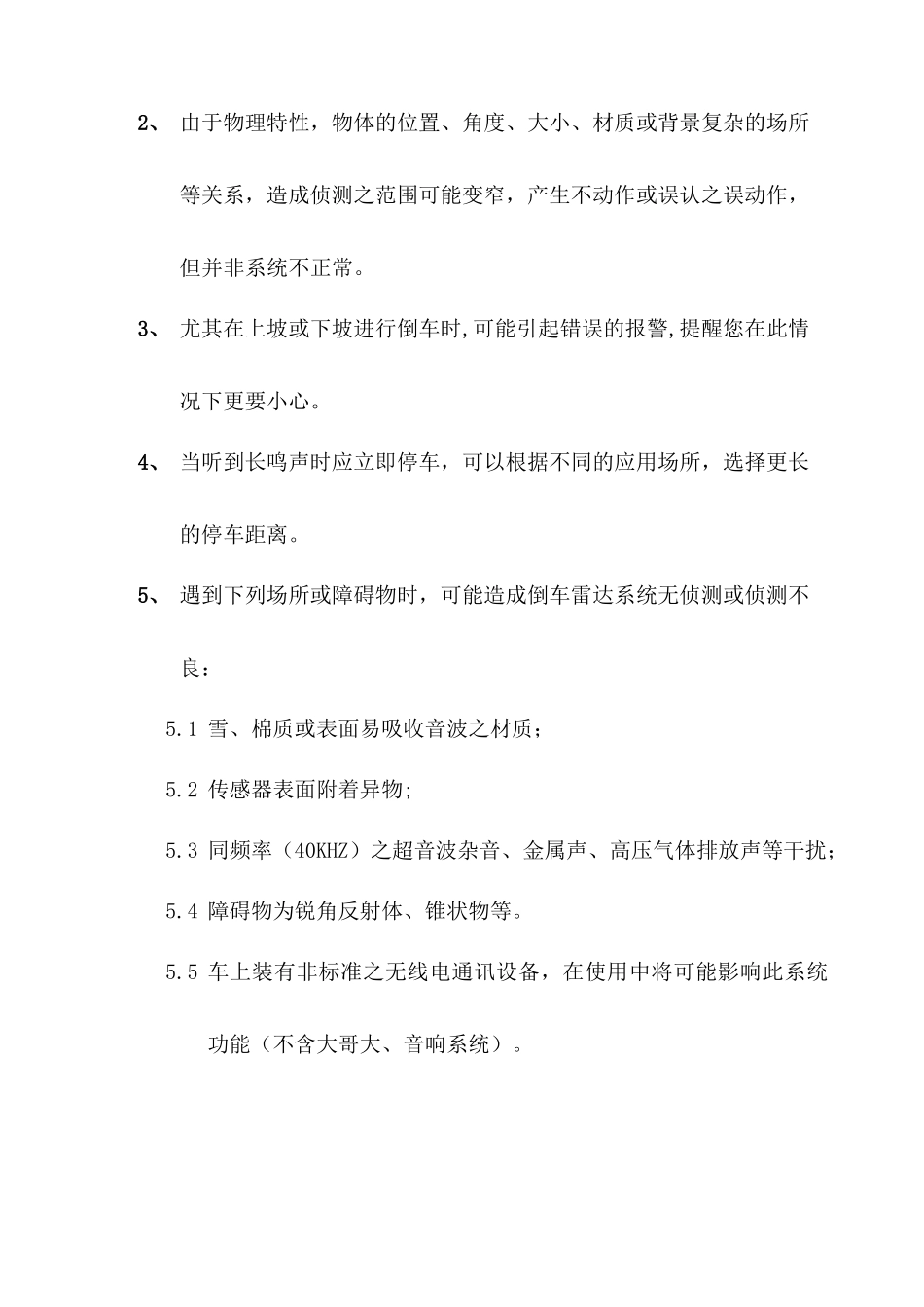
3、摄像系统(1)、成像控制模块端口说明(2)、工作原理:挂“倒车档”时,摄像头开始工作,将车后影像送到AV屏幕显示,车主通过显示屏就可观察到车后障碍物状况
若此时,AV播放机在播放其它节目源,则自动中断当前播放,切换为倒车后视图像显示
二、系统功能1、传感器自检功能:挂“倒档”时,倒车雷达系统自动测试功能是否正常
如果一切正常,蜂鸣器不鸣叫,直接进入工作状态;若有某个雷达传感器损坏或接线不良,蜂鸣器响两声;若两个雷达传感器损坏或接线不良,蜂鸣器响三声
2、倒车影像与报警功能:挂“倒档”时,AV显示屏将切换成显示倒车影像,当障碍物距传感器小于90厘米时,蜂鸣器徐缓鸣叫;障碍物距传感器小于50厘米时,蜂鸣器急促鸣叫;障碍物距传感器小于30厘米时,蜂鸣器长鸣,此时即应停车
三、使用上注意事项:1、为确保倒车安全,倒车时保持5公里/小时以下的速度行驶
2、由于物理特性,物体的位置、角度、大小、材质或背景复杂的场所等关系,造成侦测之范围可能变窄,产生不动作或误认之误动作,但并非系统不正常
3、尤其在上坡或下坡进行倒车时,可能引起错误的报警,提醒您在此情况下更要小心
4、当听到长鸣声时应立即停车,可以根据不同的应用场所,选择更长的停车距离
5、遇到下列场所