第一章汽车控制器区域网CAN总线简介1
1CAN总线的形成一、CAN总线到底是什么
CAN总线又称CAN-bus,CAN是ControllerAreaNetwork的缩写,即控制器区域网,所以,CAN总线是指控制器区域网现场总线
CAN总线即为人们所称的汽车网络
二、汽车常规布线法的缺陷1
布线复杂,铜线成倍增加
一辆采用传统布线方法的高档汽车中,其电线长度可达2km,电气节点高达1500个
而且,该数字大约每10年增长1倍,从而加剧了粗大的线束与汽车有限的可用空间之间的矛盾
故障率上升,维修难度加大
(节点接触不好,线束整理麻烦,单根导线的检测也麻烦)3
设计和试制困难
每个车型的线束都不一样,每种车都要单独设计,且电控单元针脚数增加
替代电气配件困难
替代某个落后的电气配件,要增加几根线,因无法加到原线束中,只能从外面加线,这样会使线路更加凌乱
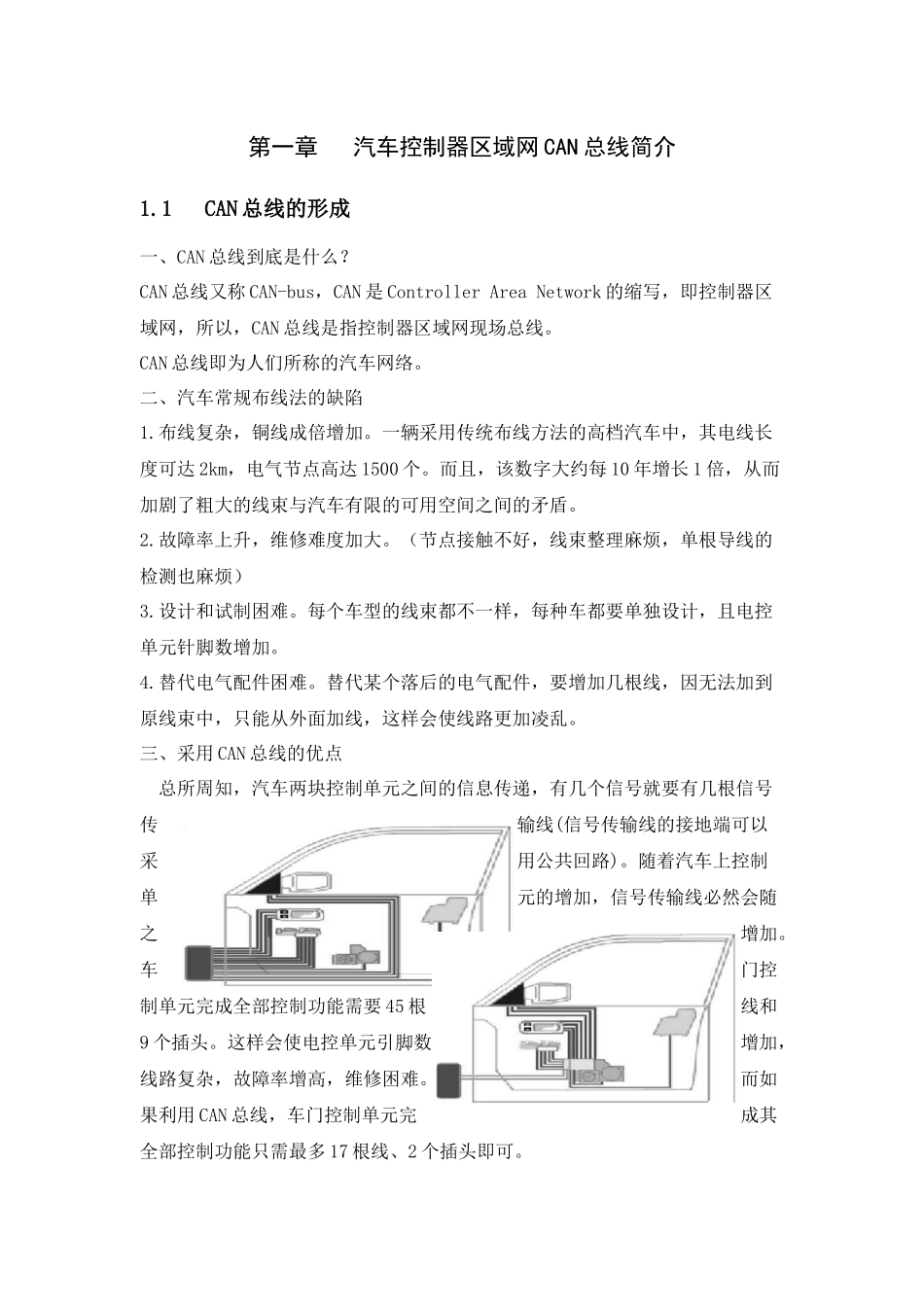
三、采用CAN总线的优点总所周知,汽车两块控制单元之间的信息传递,有几个信号就要有几根信号传输线(信号传输线的接地端可以采用公共回路)
随着汽车上控制单元的增加,信号传输线必然会随之增加
车门控制单元完成全部控制功能需要45根线和9个插头
这样会使电控单元引脚数增加,线路复杂,故障率增高,维修困难
而如果利用CAN总线,车门控制单元完成其全部控制功能只需最多17根线、2个插头即可
四、CAN-bus的发展历史大众公司首次在97年PASSAT的舒适系统上采用了传送速率为62
5Kbit/m的Canbus
98年在PASSAT和GOLF的驱动系统上增加了Canbus,传送速率为500Kbit/m
2000年,大众公司在PASSAT和GOLF采用了带有网关的第二代Canbus
2001年,大众公司提高了Canbus的设计标准,将舒适系统Canbus提高到100Kbit/m,驱动系统提高到500Kbit/m
2002年,大众集团