CAN总线控制网络实时性分析将通信网络引人控制系统,连接智能现场设备和自动化系统,实现了现场设备控制的分布化和网络化,同时也加强了现场控制和上层管理的联系
同时由于网络中的信息源很多,信息的传送要分时占用网络通信线路,而网络的承载能力和通信带宽有限,必然造成信息的冲撞、重传等现象的发生,使得信息在传输过程中不可避免地存在时延
目前国际上CAN总线的研究人员也提出了几种高层协议,但是这些协议都不兼备对网络灵活性和实时性的支持
本文以CAN总线为研究对象,对于网络闭环控制系统的设计提出了两点改善方案
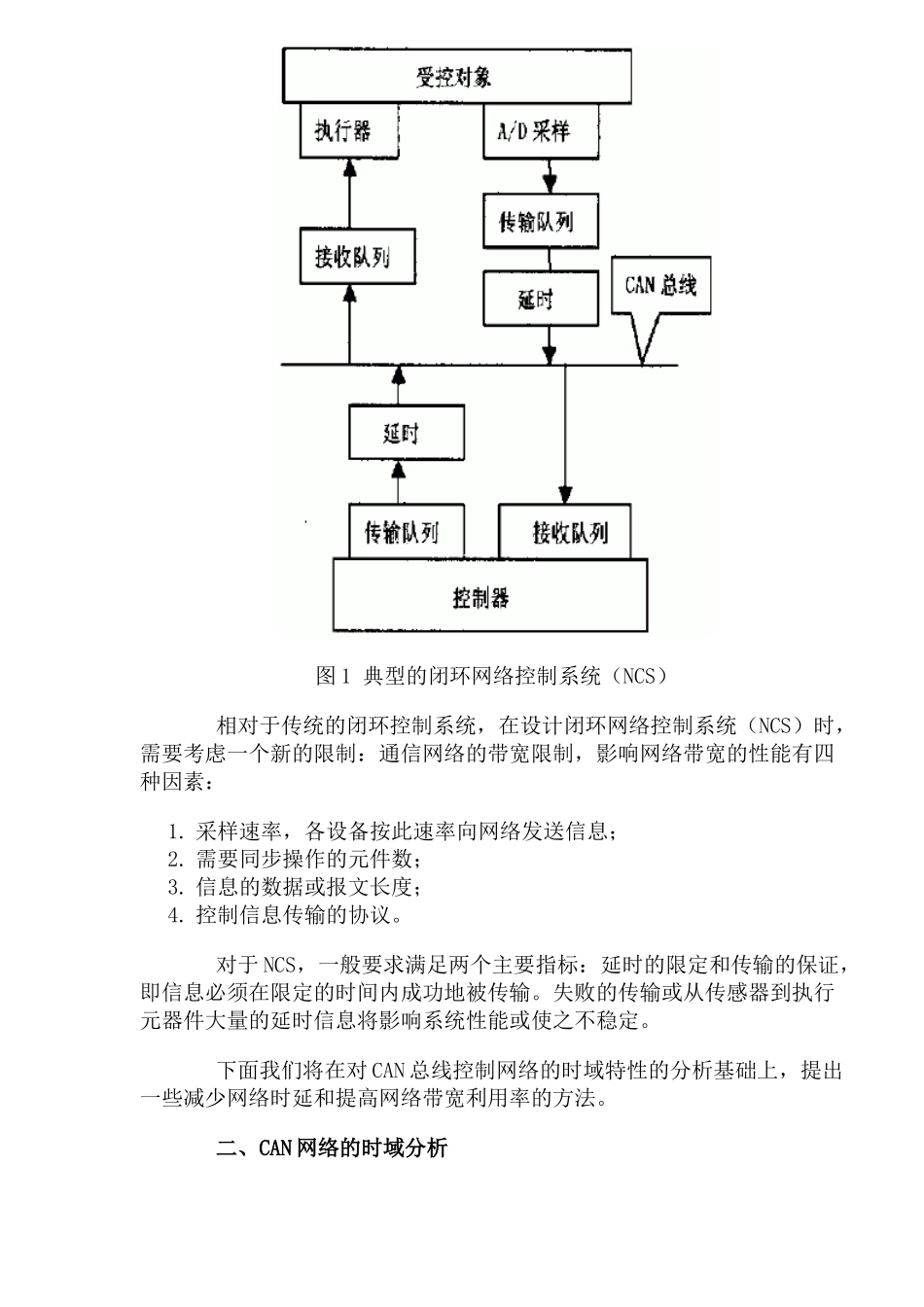
一、CAN闭环网络控制系统随着控制系统趋于复杂化,对于一个独立的闭环控制系统,受控对象和控制器一般都会分布在网络的不同部分,一个典型的CAN总线闭环网络控制系统如图1所示
图1典型的闭环网络控制系统(NCS)相对于传统的闭环控制系统,在设计闭环网络控制系统(NCS)时,需要考虑一个新的限制:通信网络的带宽限制,影响网络带宽的性能有四种因素:1
采样速率,各设备按此速率向网络发送信息;2
需要同步操作的元件数;3
信息的数据或报文长度;4
控制信息传输的协议
对于NCS,一般要求满足两个主要指标:延时的限定和传输的保证,即信息必须在限定的时间内成功地被传输
失败的传输或从传感器到执行元器件大量的延时信息将影响系统性能或使之不稳定
下面我们将在对CAN总线控制网络的时域特性的分析基础上,提出一些减少网络时延和提高网络带宽利用率的方法
二、CAN网络的时域分析CAN协议转为短报文而优化,并使用报文优先权仲裁介质访问方法
具有较高优先权的报文在仲裁时总能得到介质的访问权,所以较高优先级报文的传输延时总可以被保证
与其他网络相比,CAN的主要缺点在于较低的数据速率
因为CAN网络为位同步总线
CAN的最大速率为1Mbps,同样限制了网络的最大长度
这里将用研究时域参数的方法描述CAN控制网络