第1页共11页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共11页模电1二极管串联使用时一般需()
A并联分流电阻B并联均压电阻C串联均压电阻D串联分流电阻二极管并联使用时一般需()
A并联分流电阻B并联均压电阻C串联均流电阻D串联分流电阻将万用表的红表笔和黑表笔分别接到二极管的两个电极引出端,测量电阻值,再把两表笔对调作第二次测量,()则说明二极管的性能是好的
A一次较小(几百欧~几千欧),一次较大(大于几百千欧)B一次为零,一次为无穷大C两次电阻较小(几百欧~几千欧)D两次电阻较大(大于几百千欧)第2页共11页第1页共11页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第2页共11页在开关电路中晶体三极管工作于()
A放大区和截止区B放大区和饱和区C饱和区和截止区D放大区、饱和区和截止区晶体三极管管脚若以等腰三角形排列,则()
A顶点是发射极,左边为基极,右边为集电极B顶点是基极,左边为集电极,右边为发射极C顶点是基极,左边为发射极,右边为集电极D顶点是集电极,左边为发射极,右边为基极放大电路带负载后,()
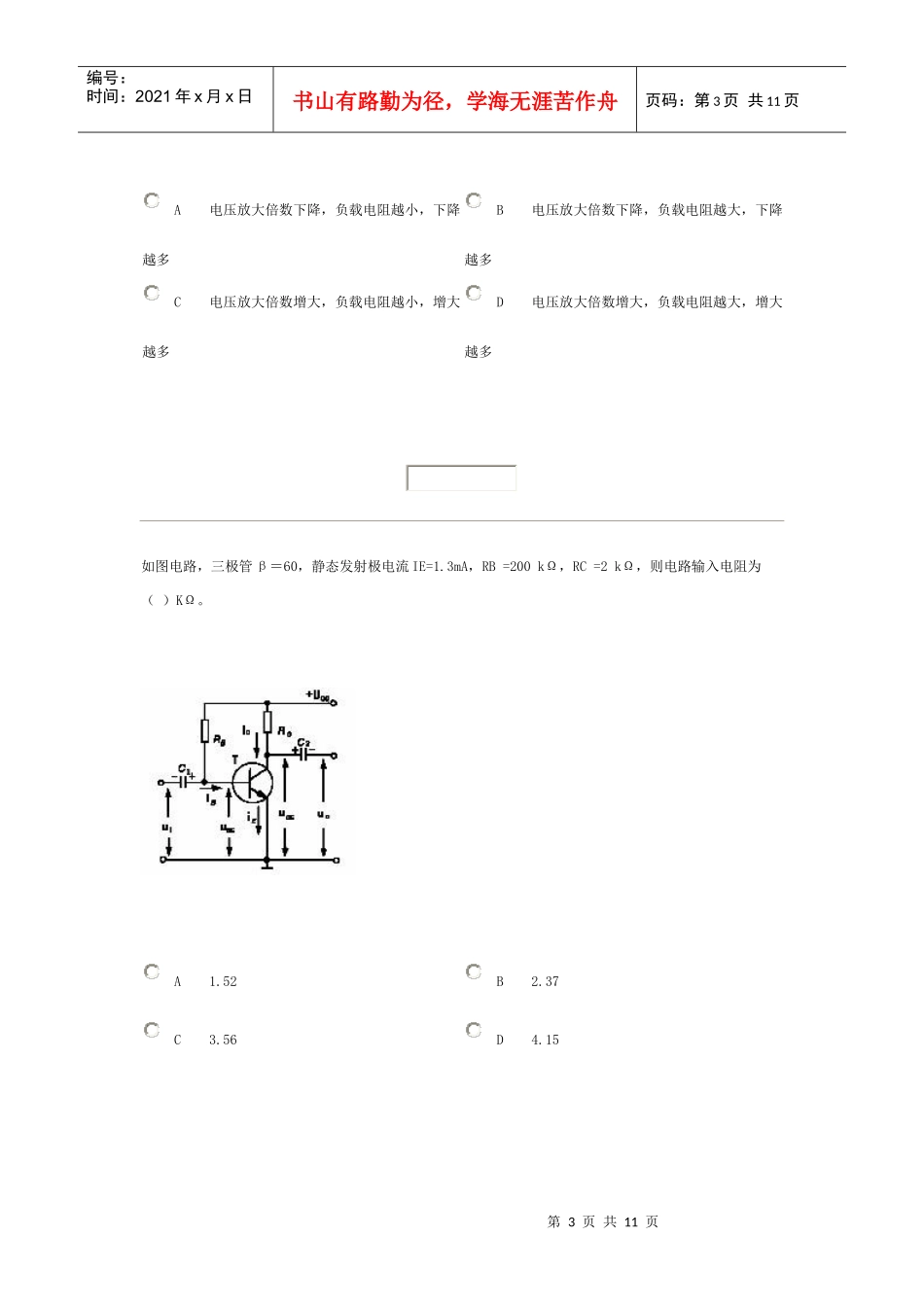
第3页共11页第2页共11页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第3页共11页A电压放大倍数下降,负载电阻越小,下降越多B电压放大倍数下降,负载电阻越大,下降越多C电压放大倍数增大,负载电阻越小,增大越多D电压放大倍数增大,负载电阻越大,增大越多如图电路,三极管β=60,静态发射极电流IE=1
3mA,RB=200kΩ,RC=2kΩ,则电路输入电阻为()KΩ
15第4页共11页第3页共11页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第4页共11页运算放大器(简称运放)是一个()的多级放大器
A直接耦合B间接耦合C阻容耦合D变压器耦