第1页共17页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共17页机械原理课程设计说明书设计题目:压床机构设计工程院(系)机械制造专业班级机制1082班学号200811411203设计者黄军指导老师刘峰完成日期2010年7月16日广东海洋大学第2页共17页第1页共17页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第2页共17页目录一
设计要求----------------------------------------------------------------31
压床机构简介--------------------------------------------------------------------32
设计内容-----------------------------------------------------------------3(1)机构的设计及运动分折-------------------------------------------------3(2)机构的动态静力分析----------------------------------------------------3(3)凸轮机构构设计---------------------------------------------------------3二.压床机构的设计:----------------------------------------------------41
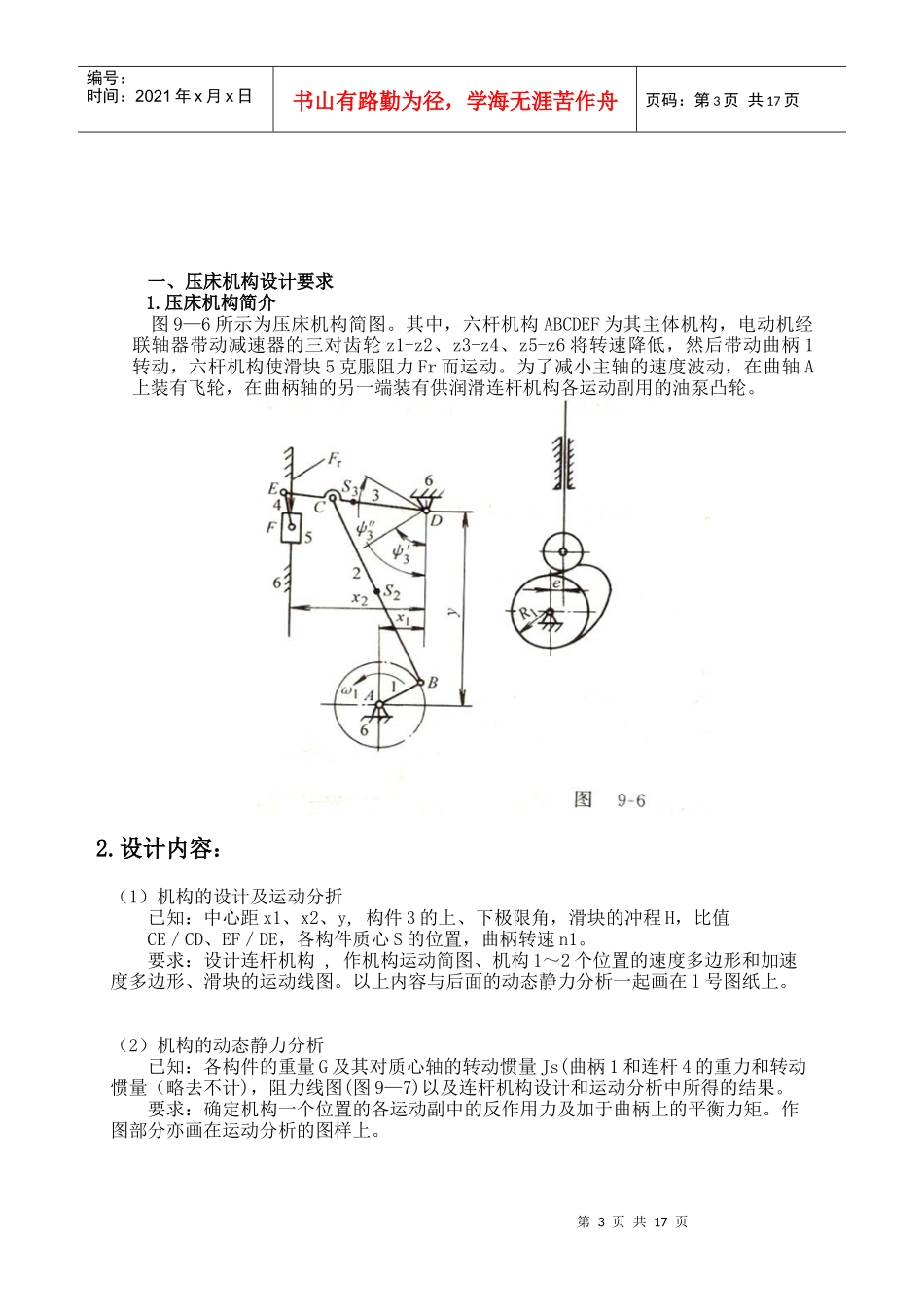
连杆机构的设计及运动分析------------------------------------------4(1)作机构运动简图-----------------------------------------------------4(2)计算长度--