第1页共8页21n1题1-6-3图Ft2Fa2n2Fr22O2O2题解1-6-3图Fa1Ft1O1n11Fr1O1编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共8页11-2有一阿基米德蜗杆传动,已知:传动比i=18,蜗杆头数Z1=2,直径系数q=8,分度圆直径d1=80mm
试求:(1)模数m、蜗杆分度圆柱导程角γ、蜗轮齿数Z2及分度圆柱螺旋角β;(2)蜗轮的分度圆直径d2和蜗杆传动中心距ɑ
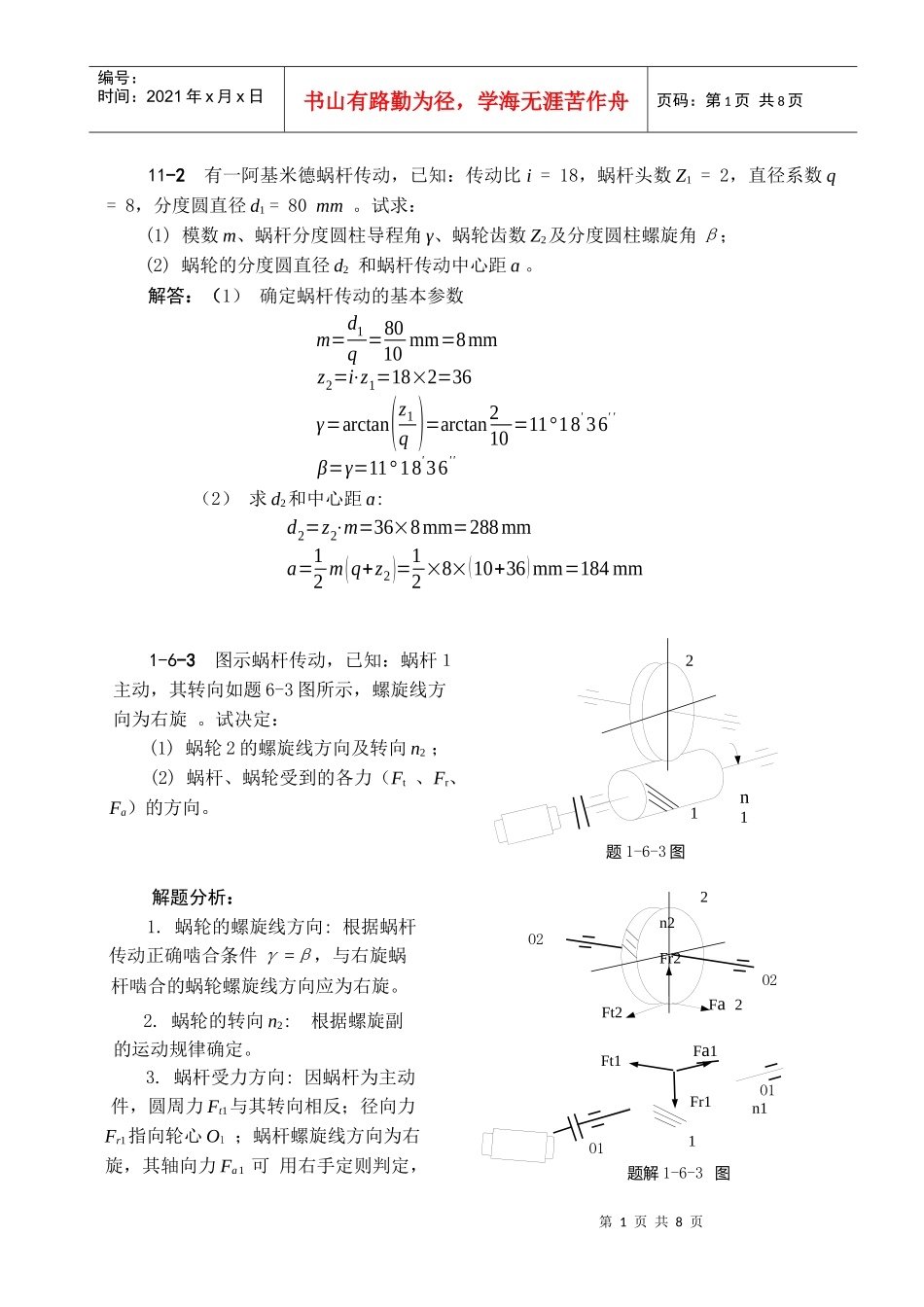
解答:(1)确定蜗杆传动的基本参数m=d1q=8010mm=8mmz2=i⋅z1=18×2=36γ=arctan(z1q)=arctan210=11°18'36''β=γ=11°18'36''(2)求d2和中心距ɑ:d2=z2⋅m=36×8mm=288mma=12m(q+z2)=12×8×(10+36)mm=184mm1-6-3图示蜗杆传动,已知:蜗杆1主动,其转向如题6-3图所示,螺旋线方向为右旋
试决定:(1)蜗轮2的螺旋线方向及转向n2;(2)蜗杆、蜗轮受到的各力(Ft、Fr、Fa)的方向
解题分析:1
蜗轮的螺旋线方向:根据蜗杆传动正确啮合条件γ=β,与右旋蜗杆啮合的蜗轮螺旋线方向应为右旋
蜗轮的转向n2:根据螺旋副的运动规律确定
蜗杆受力方向:因蜗杆为主动件,圆周力Ft1与其转向相反;径向力Fr1指向轮心O1;蜗杆螺旋线方向为右旋,其轴向力Fa1可用右手定则判定,第2页共8页第1页共8页O2O2题1-6-4图-3图O2O2n2Fr2Ft2Fa2Ft1Fa11Fr1n1题解1-6-4图Fr1O1n2O2Fr2Fa2Ft2O1n1Fa1Ft1编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第2页共8页即右手握蜗杆,四指沿n1方向弯曲,大拇指的指向则为轴向力Fa1的方向