第1页共7页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共7页第4单元学时数:学时教学目的与要求:理解运动链的可动性及运动确定性的条件;能正确计算平面机构的自由度
教学重点与难点:重点:平面机构自由度的计算难点:自由度计算时应注意的特殊结构教学手段与方式:课堂讲授,教学内容:第一章机械传动系统的运动分析第三节平面机构的自由度一、平面机构自由度的计算二、机构具有确定运动的条件三、计算平面机构的自由度时应注意的特殊结构第四节机械传动系统的运动分析实例第一章机械传动系统的运动分析第三节平面机构的自由度一、平面机构自由度的计算1.平面机构自由度机构中各构件相对于机架所能有的独立运动的数目
构件的自由度第2页共7页第1页共7页S31231234θ1123编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第2页共7页两构件用运动副联接后,彼此的相对运动受到某些约束
低副引入两个约束
(图形见课件)高副引入一个约束
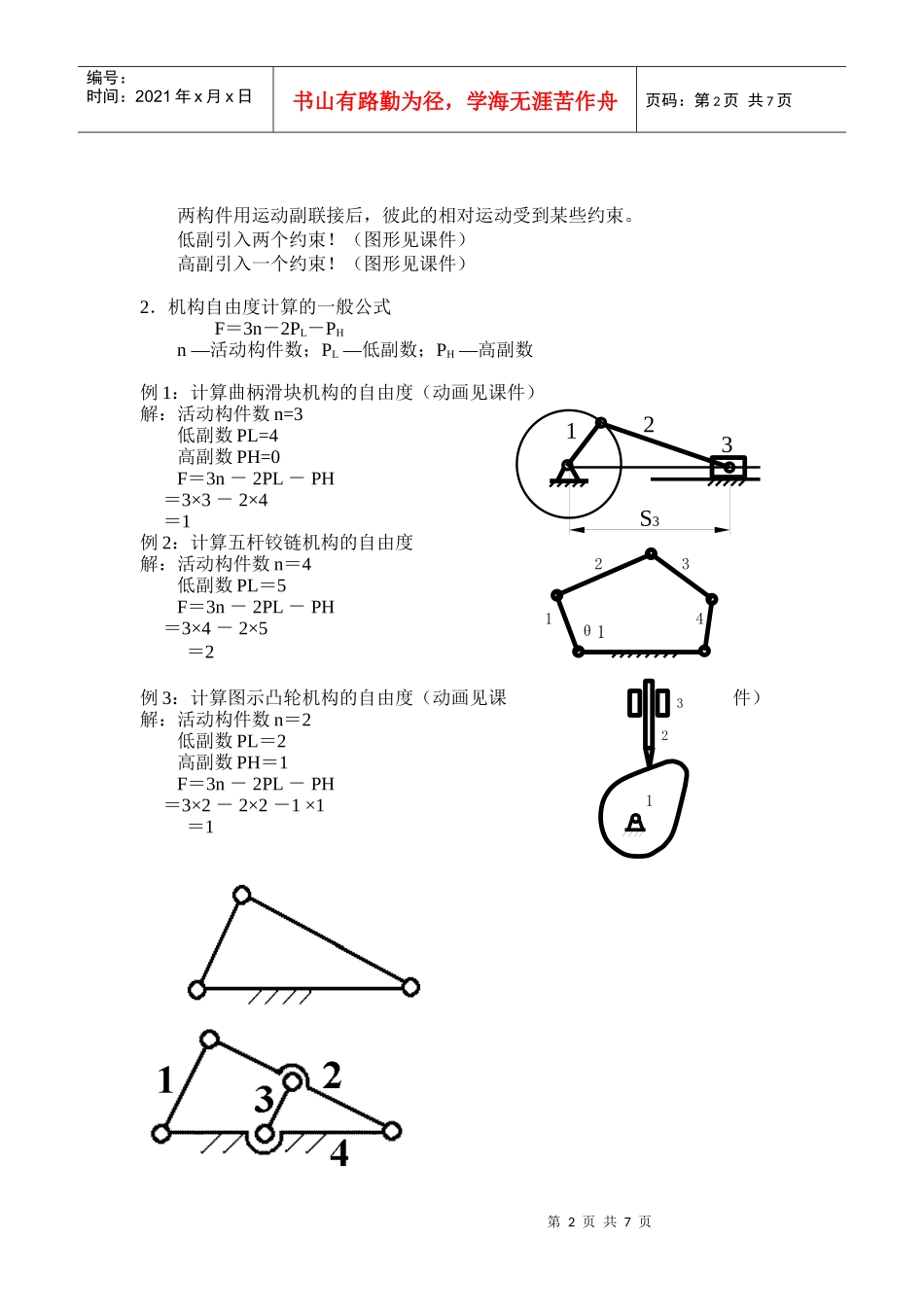
(图形见课件)2.机构自由度计算的一般公式F=3n-2PL-PHn—活动构件数;PL—低副数;PH—高副数例1:计算曲柄滑块机构的自由度(动画见课件)解:活动构件数n=3低副数PL=4高副数PH=0F=3n-2PL-PH=3×3-2×4=1例2:计算五杆铰链机构的自由度解:活动构件数n=4低副数PL=5F=3n-2PL-PH=3×4-2×5=2例3:计算图示凸轮机构的自由度(动画见课件)解:活动构件数n=2低副数PL=2高副数PH=1F=3n-2PL-PH=3×2-2×2-1×1=1第3页共7页第2页共7页ABC321ABC321213233F112223F编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第3页共7页F=3×2–2×3=0(桁架)F=3×3–2×5=-1(超静定桁架)二、机构