NACHI机器人维修技术NACHI(不二越)机器人2009-07-2310:43:23阅读370评论3字号:大中小订阅摘要NACHI的SH200-01机器人常见故障的原因和处理方法,SH200-01机器人的结构和控制原理
关键词NACHI机器人伺服单元编码器AW控制器1概述在制造业中诞生的工业机器人是继动力机、计算机之后而出现的全面延伸人的体力和智力的新一代生产工具
机器人是一种具有高度柔性的自动化装备,对提高制造生产线的柔性具有特别重要的意义,它作为现代制造业的主要自动化装备在制造业中广泛应用,并将在未来的制造企业中扮演越来越重要的角色
伴随着工业机器人在制造业应用,如何维修机器人,保证机器人的使用效率,成为影响机器人应用的技术问题,现以日本NACHI公司的SH200型机器人为例,介绍有关机器人常见故障的原因及处理方法
2NACHISH200-01的基本控制原理2
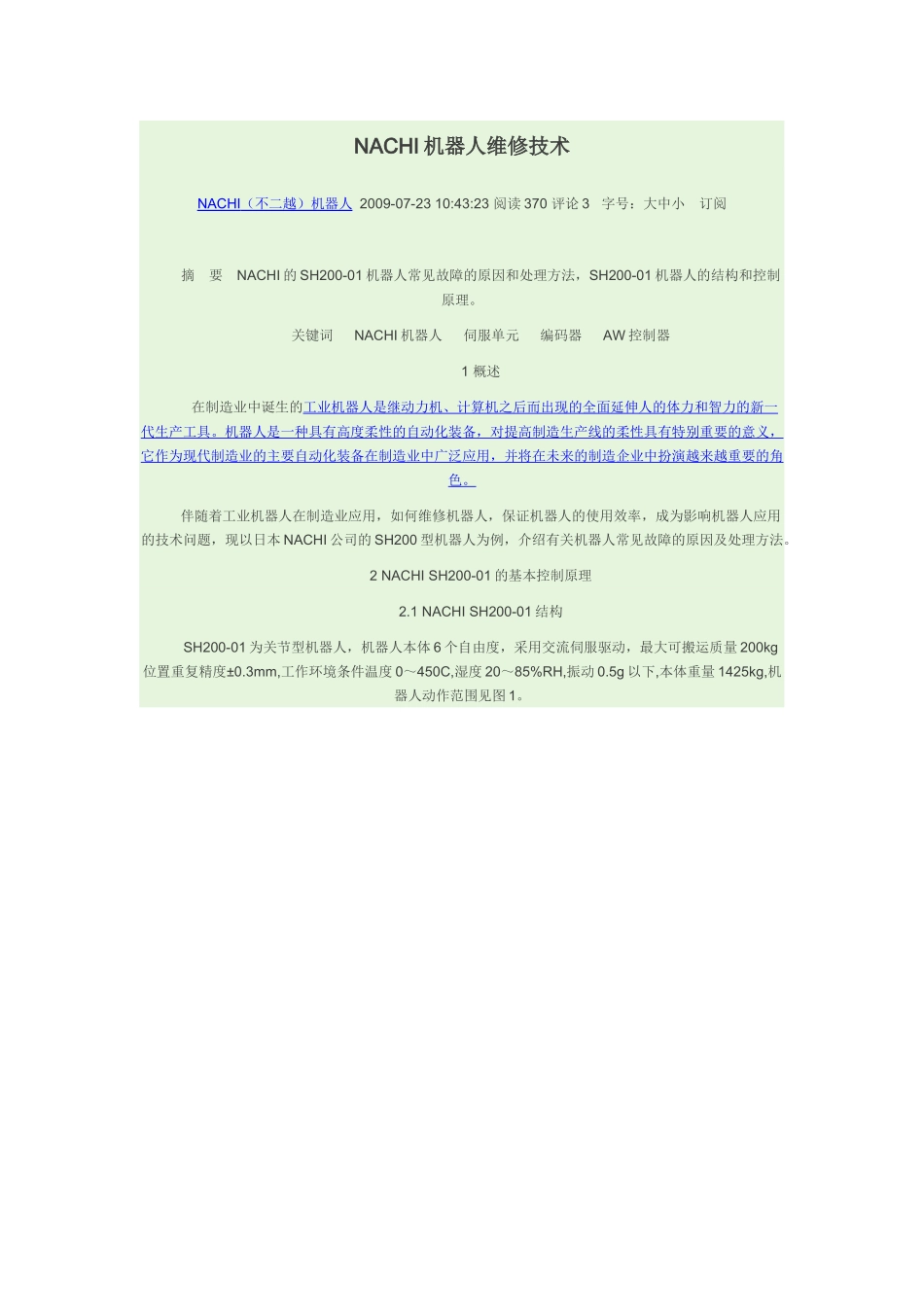
1NACHISH200-01结构SH200-01为关节型机器人,机器人本体6个自由度,采用交流伺服驱动,最大可搬运质量200kg位置重复精度±0
3mm,工作环境条件温度0~450C,湿度20~85%RH,振动0
5g以下,本体重量1425kg,机器人动作范围见图1
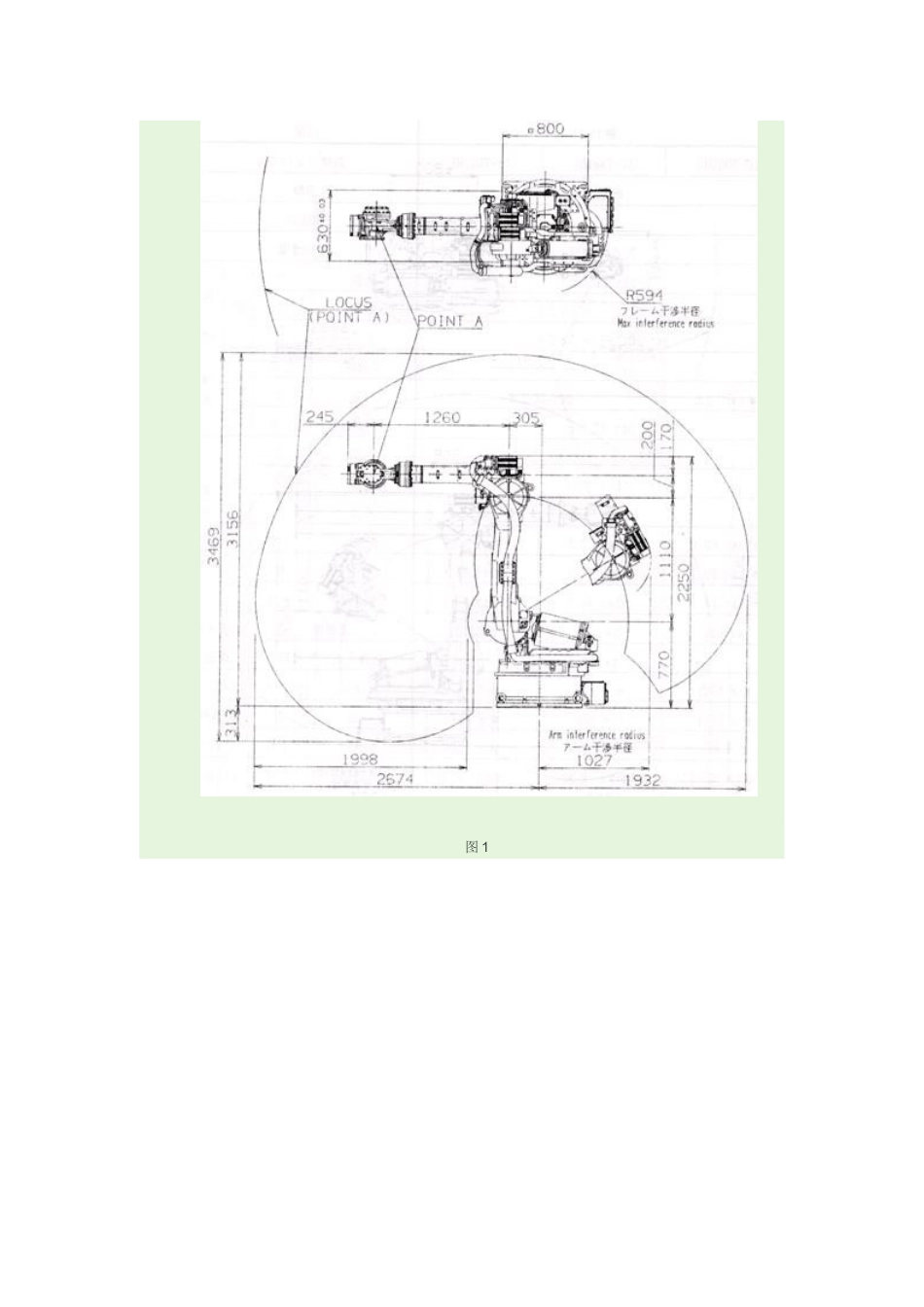
图1图2SH200-01机器人本体共有6个轴(S,H,V,R2,B,R1),每个轴由1台伺服电机驱动,伺服电机带有电磁抱闸、绝对位置编码器,机器人本体的各轴示意见图2
2SH200-01机器人控制器SH200-01机器人控制控制器型号为AW11,AW11控制器是机器人的控制中心,主要元件及功能如下:(1)母板UM122:系统总线板
(2)主CPU板(UM116):微处理器及接口电路,用户程序、常数存储器等
(3)I/O板UM119-10:内置PLC、I/O接口电路
(4)I/O连接器板UM124(或UM160):I/O连接器
(5)伺服单元:R