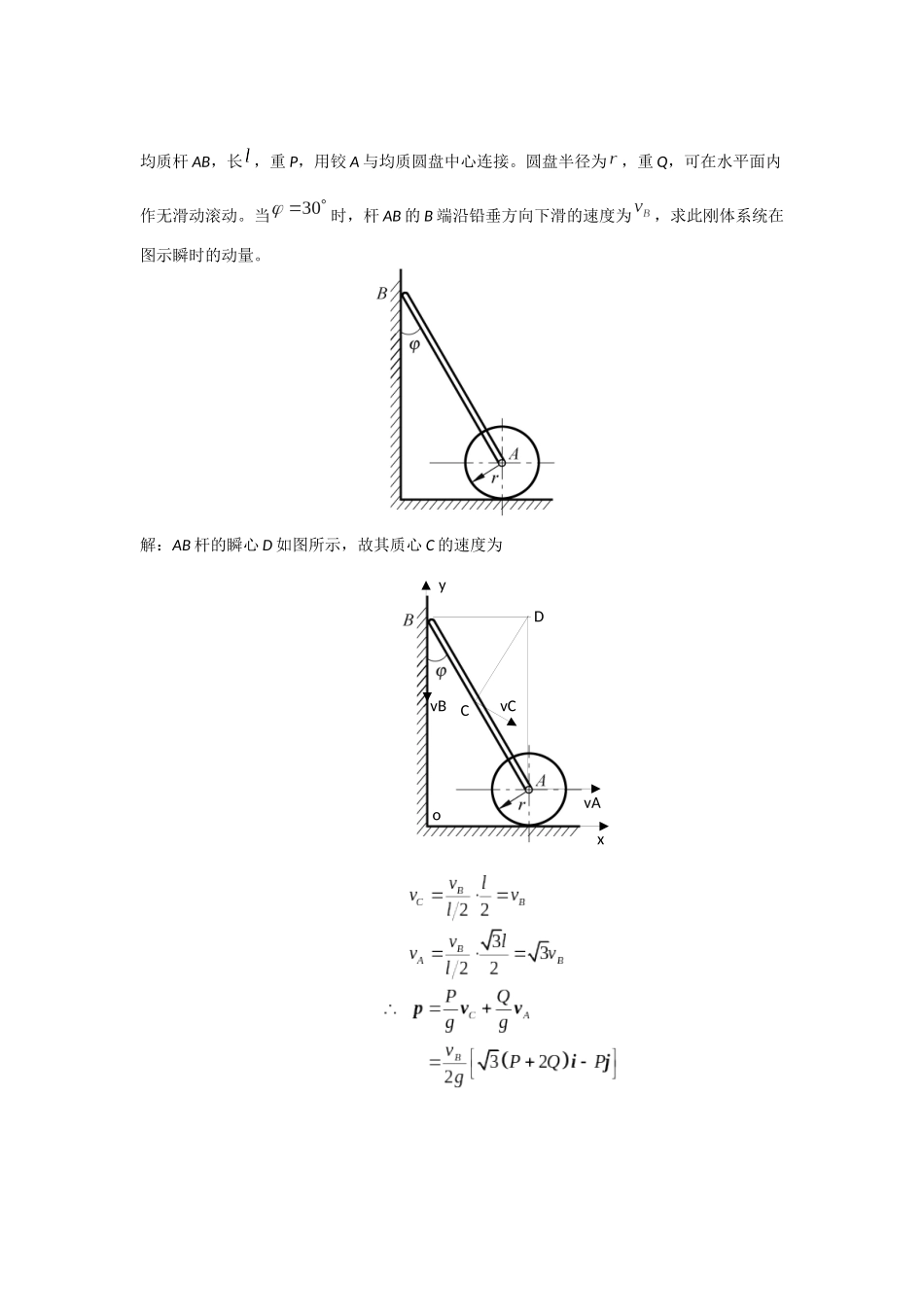
vAvBvCDCxyo均质杆AB,长,重P,用铰A与均质圆盘中心连接
圆盘半径为,重Q,可在水平面内作无滑动滚动
当时,杆AB的B端沿铅垂方向下滑的速度为,求此刚体系统在图示瞬时的动量
解:AB杆的瞬心D如图所示,故其质心C的速度为往复式水泵的固定外壳部分D和基础E的质量为,均质曲柄OA长为,质量为
导杆B和活塞C作往复运动,其质量为
曲柄OA以匀角速度绕O轴转动
求水泵基础给地面的压力
解:建立坐标系,x轴水平向右为正方向,y轴竖直向上为正方向
系统中外壳D和基础E固定,曲柄OA作匀速转动,并带动导杆和活塞平动
系统的总动量为:p=m2r2ω(cosωti+sinωtj)+m3rωsinωtj由y方向的动量定理得:m2r2ω2cosωt+m3rω2cosωt=N−(m1+m2+m3)gN=(m1+m2+m3)g+12(m2+2m3)rω2cosωt图示凸轮机构中,凸轮半径为r、偏心距为e
凸轮绕A轴以匀角速转动,带动滑杆D在套筒E中沿水平方向作往复运动
已知凸轮质量为m1,滑杆质量为m2
试求在任意瞬时机座螺栓所受的动反力
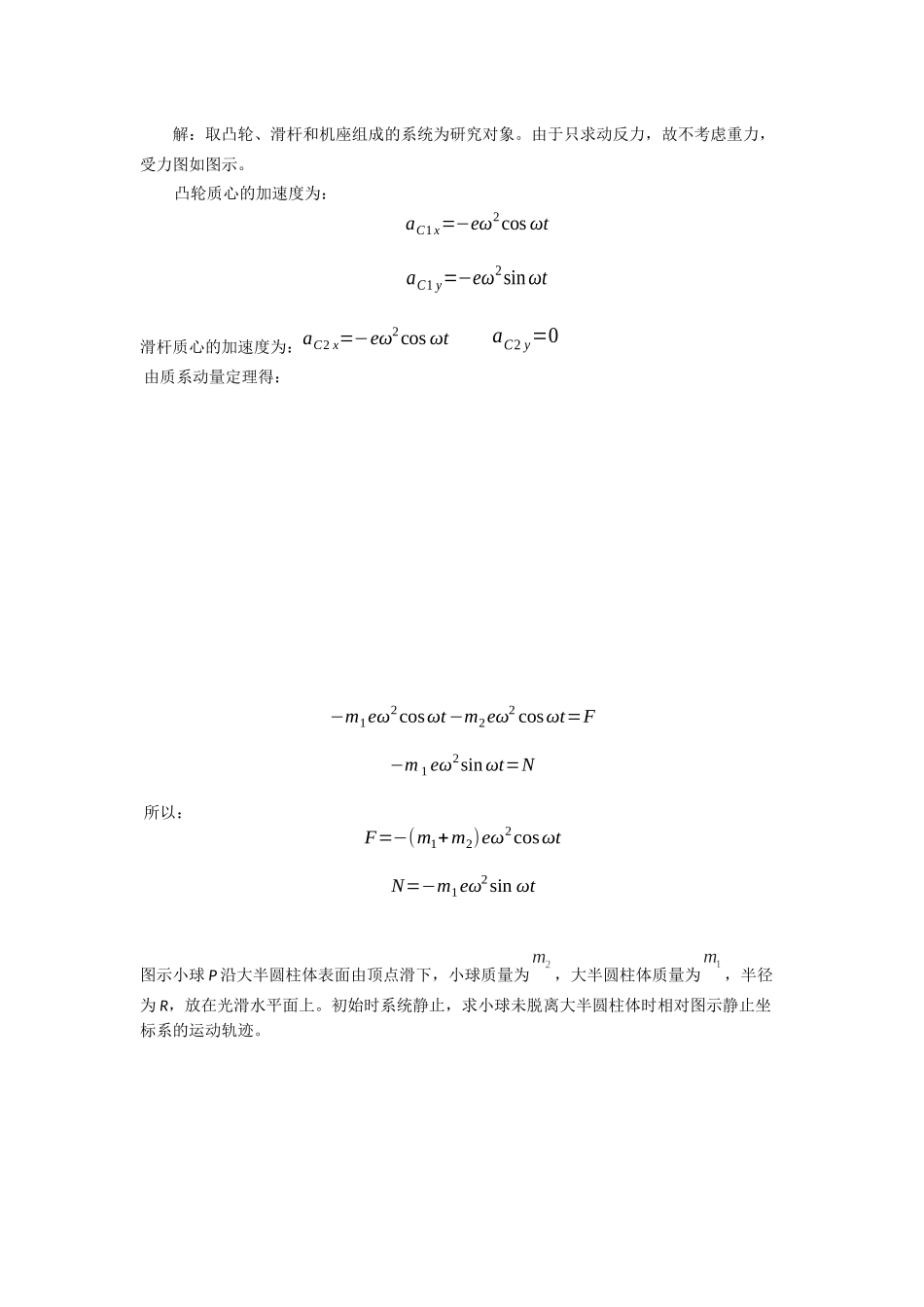
解:取凸轮、滑杆和机座组成的系统为研究对象
由于只求动反力,故不考虑重力,受力图如图示
凸轮质心的加速度为:aC1x=−eω2cosωtaC1y=−eω2sinωt滑杆质心的加速度为:aC2x=−eω2cosωtaC2y=0由质系动量定理得:−m1eω2cosωt−m2eω2cosωt=F−m1eω2sinωt=N所以:F=−(m1+m2)eω2cosωtN=−m1eω2sinωt图示小球P沿大半圆柱体表面由顶点滑下,小球质量为,大半圆柱体质量为,半径为R,放在光滑水平面上
初始时系统静止,求小球未脱离大半圆柱体时相对图示静止坐标系的运动轨迹
解:根据题意,视小球为质点,大半圆柱体作平动
系统在水平方向动量守恒
设小球水平方向的位移为x,竖直方向的位移