机械原理作业集第一章绪论1—1试说明机器与机构的特征、区别和联系
解:机器具有如下三个特征:1、人造的实物组合体2、各部分具有确定的相对运动3、代替或减轻人类劳动,完成有用功或实现能量的转换机构则具有机器的前两个特征
机器与机构的区别:研究的重点不同:机构:实现运动的转换和力的传递;机器:完成能量的转换或作有益的机械功
机器与机构的联系:机器由机构组成,一部机器包含不同的机构;不同的机器可能包含相同的机构
1—2试举出两个机器实例,并说明其组成、功能
解:车床:由原动部分(电动机)+传动系统(齿轮箱)+执行部分(刀架、卡盘等),其主要功能为切削,代替人作功
汽车:由原动部分(发动机)+传动系统(变速箱)+执行部分(车轮等),其主要功能为行走、运输,代替人作功
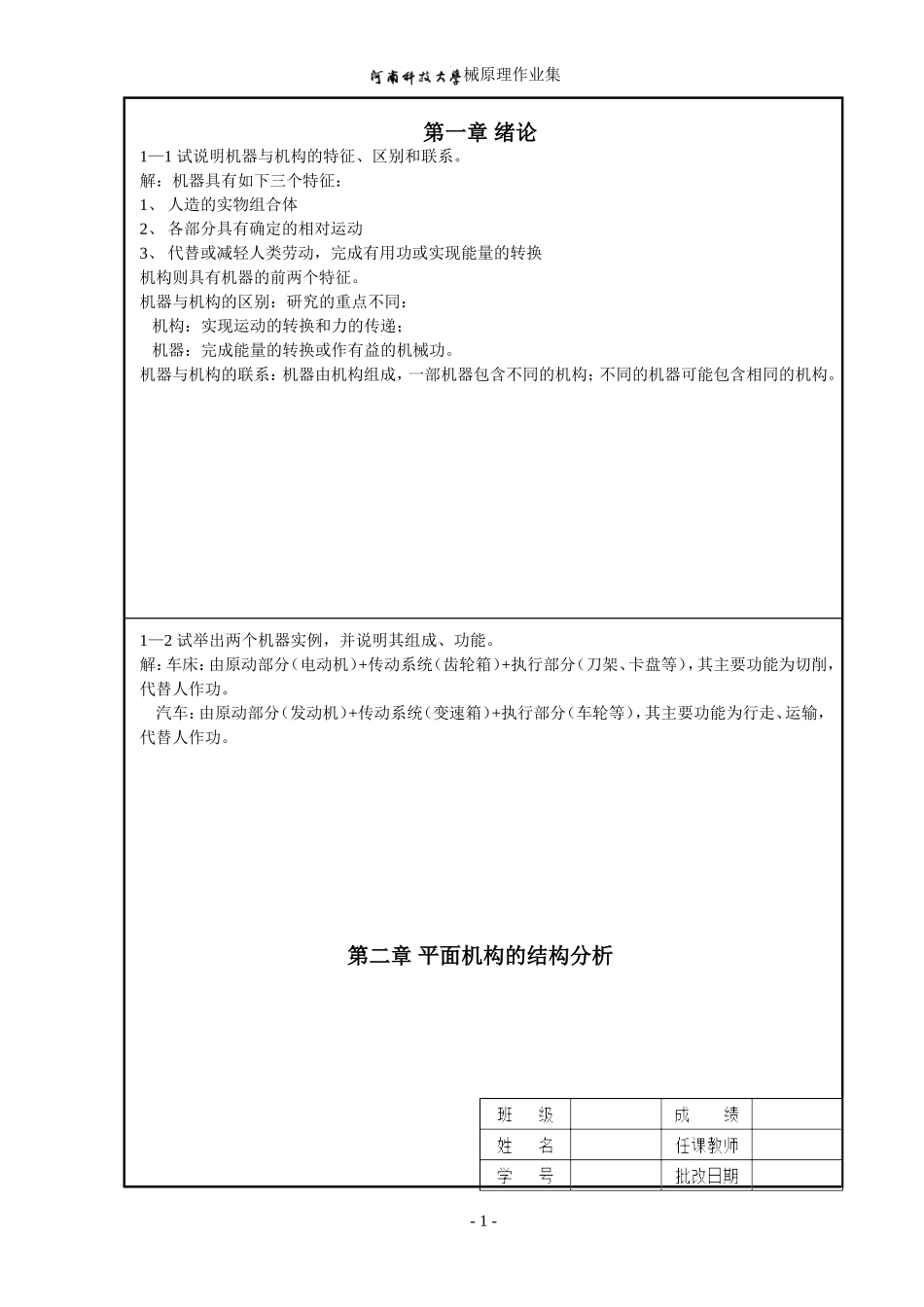
第二章平面机构的结构分析-1-机械原理作业集2—1试画出唧筒机构的运动简图,并计算其自由度
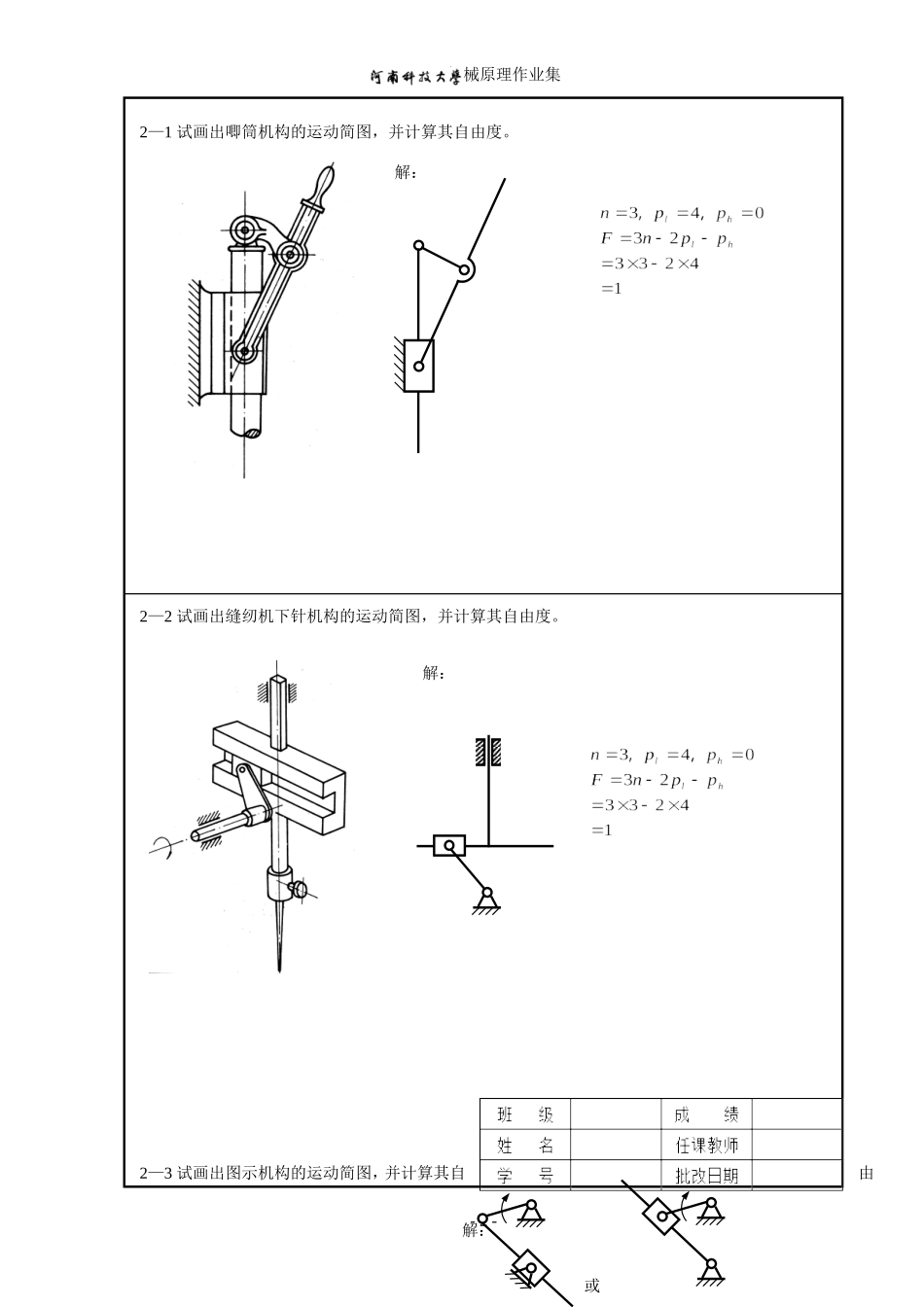
2—2试画出缝纫机下针机构的运动简图,并计算其自由度
2—3试画出图示机构的运动简图,并计算其自由-2-解:解:解:或机械原理作业集度
2—4试画出简易冲床的运动简图,并计算其自由度
-3-解:机械原理作业集2—5图示为一简易冲床的初拟设计方案
设计者的思路是:动力由齿轮1输入,使轴A连续回转,而装在轴A上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的,试绘出其机构运动简图,分析是否能实现设计意图,并提出修改方案
解:机构简图如下:机构不能运动
可修改为:-4-或机械原理作业集2—6计算图示自动送料剪床机构的自由度,并指出其中是否有复合铰链、局部自由度或虚约束
2—7计算图示机构的自由度,并指出其中是否有复合铰链、局部自由度或虚约束
说明该机构具有确定运动的条件
机构具有确定运动的条件是:F=原动件数,即取1个原动件
-5-HGCFDE解1:C为复合铰链,F、I为局部自由度
解1:C、F为复合铰链,I为局部