单像空间后方交会(遥感07-1、2学生适用)测绘学院王双亭1概述1
1定义利用一定数量的地面控制点和对应像点坐标求解单张像片外方位元素的方法称为空间后方交会
2所需控制点个数与分布共线条件方程的一般形式为:(1)式中包含有六个外方位元素,即,只有确定了这六个外方位元素的值,才能利用共线条件方程真正确定一张像片的任一像点与对应地面点的坐标关系
个数:对任一控制点,我们已知其地面坐标和对应像点坐标,代入共线条件方程可以列出两个方程式,因此,只少需要3个控制点才能解算出六个外方位元素
在实际应用中,为了避免粗差,应有多余检查点,因此,一般需要4~6个控制点
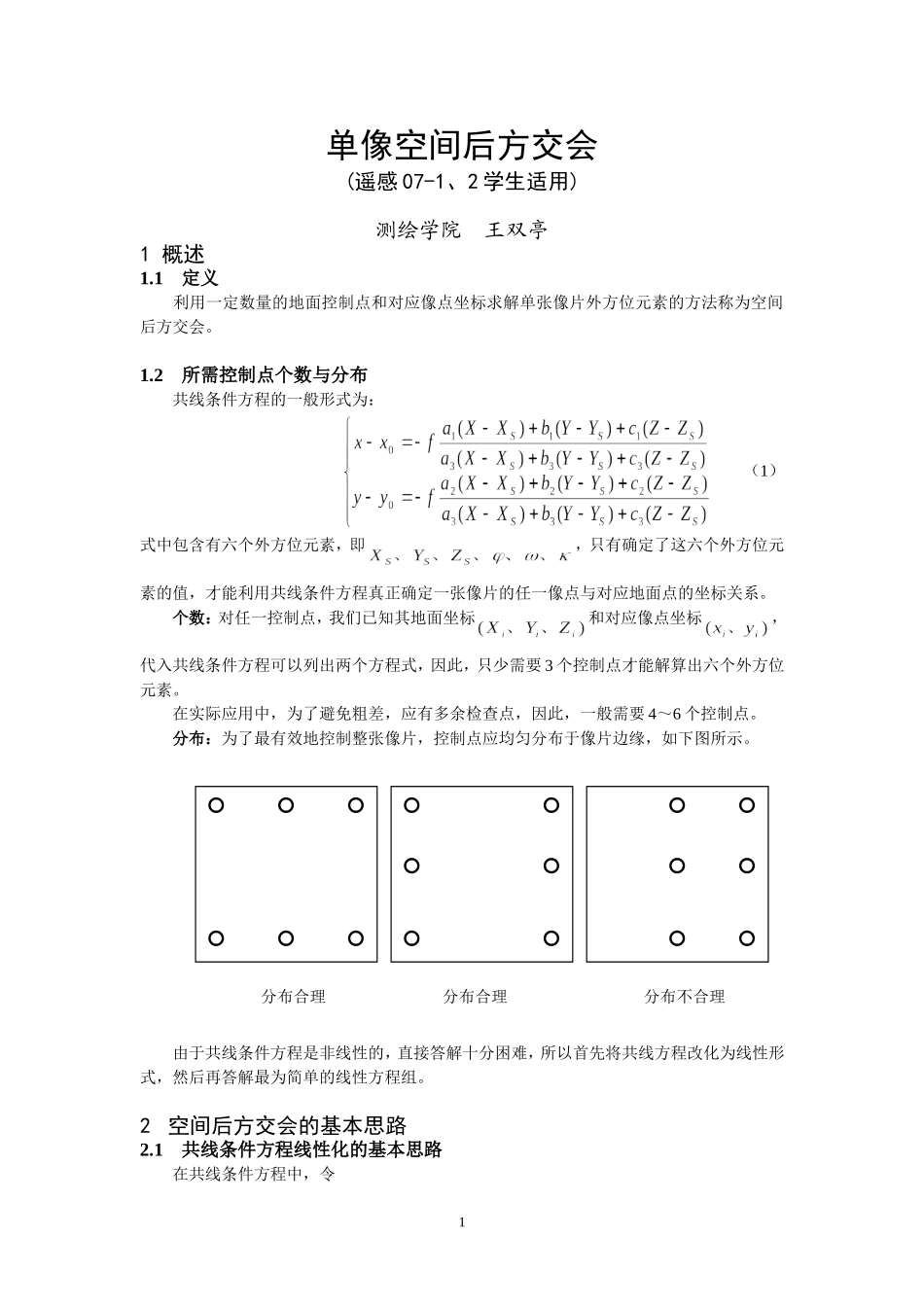
分布:为了最有效地控制整张像片,控制点应均匀分布于像片边缘,如下图所示
由于共线条件方程是非线性的,直接答解十分困难,所以首先将共线方程改化为线性形式,然后再答解最为简单的线性方程组
2空间后方交会的基本思路2
1共线条件方程线性化的基本思路在共线条件方程中,令1分布合理分布合理分布不合理(2)则共线方程变为(3)对上式两侧同乘,并移至方程同侧,则有(4)令(5)由于上式是共线方程的变形,因此,是的函数
对分别按泰劳级数展开,并且只保留一次项,得(6)式中,、分别是和的初值;、分别是和对各个外方位元素的偏导数;分别是初值的增量
为了明确(6)式中常数项的意义,对(6)式两侧同乘以,则(7)考查(7)式中的常数项,有2(8)式中是像点坐标的观测值;是由相应地面坐标和外方位元素初值计算出的像点坐标
这样(7)式中的常数项就有明确的意义,即为像点观测值和计算值之差
同样也可以得到,(9)现将(7)式改写为(10)式中,为残差;为系数;是待求值,是像点观测值和计算值之差
与(7)式相比较,显然有(10a)式(10)就是以外方位元素增量为待求值的共线条件方程线性化公式,也称误差方程式
要得到完整的线性化形式,关键是求各个系数,而求的