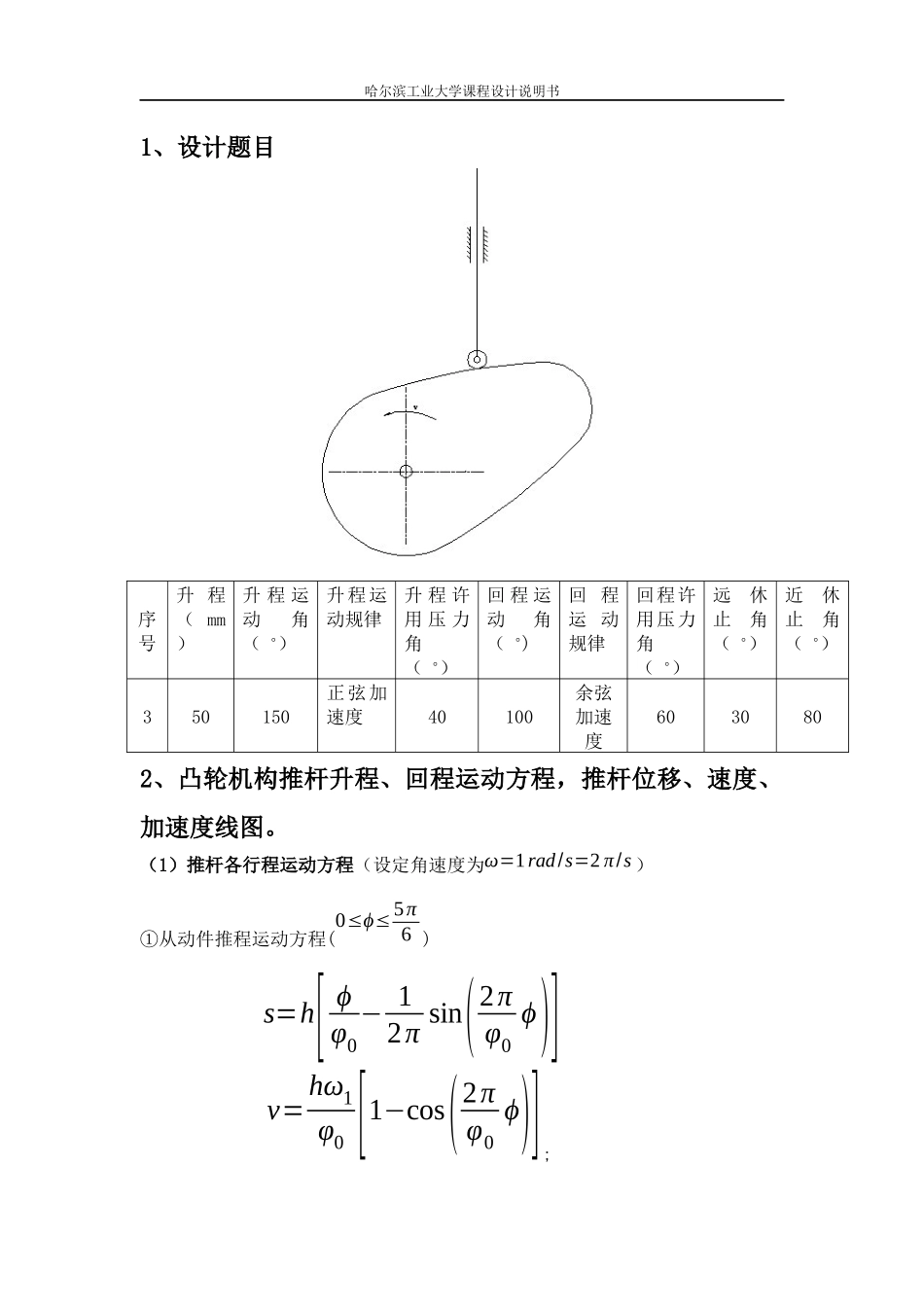
HarbinInstituteofTechnology机械原理大作业二课程名称:机械原理设计题目:凸轮结构设计院系:机电工程学院班级:设计者:学号:指导教师:设计时间:哈尔滨工业大学课程设计说明书哈尔滨工业大学哈尔滨工业大学课程设计说明书1、设计题目序号升程(mm)升程运动角(︒)升程运动规律升程许用压力角(︒)回程运动角(︒)回程运动规律回程许用压力角(︒)远休止角(︒)近休止角(︒)350150正弦加速度40100余弦加速度6030802、凸轮机构推杆升程、回程运动方程,推杆位移、速度、加速度线图。(1)推杆各行程运动方程(设定角速度为ω=1rad/s=2π/s)①从动件推程运动方程(0≤ϕ≤5π6)s=h[ϕφ0−12πsin(2πφ0ϕ)]v=hω1φ0[1−cos(2πφ0ϕ)];哈尔滨工业大学课程设计说明书a=2πhω12φ02sin(2πφ0ϕ)代入数据,可得:s=50(6ϕ5π−12πsin2.4ϕ)mmv=120(1−cos2.4ϕ)mm/sa=576πsin2.4ϕmm/s2②从动件远休程运动方程(5π6≤ϕ≤π)s=50mm;v=a=0③从动件回程运动方程(π≤ϕ≤14π9)s=h2{1+cosπφ0'[ϕ−(φ0+φs)]}v=−πhω12φ0'sinπφ0'[ϕ−(φ0+φs)]a=−π2hω122φ0'2cosπφ0'[ϕ−(φ0+φs)]代入数据,可得:s=25[1+cos(1.8ϕ−1.8π)]mmv=−90πsin(1.8ϕ−1.8π)mm/sa=−324π2cos(1.8ϕ−1.8π)mm/s2哈尔滨工业大学课程设计说明书④从动件进休程运动方程(14π9≤ϕ≤2π)s=v=a=0(2)、推杆位移、速度、加速度线图①推杆的位移线图如下②推杆的速度线图如下③推杆的加速度线图如下哈尔滨工业大学课程设计说明书3、凸轮机构的线图,并依次确定凸轮的基圆半径和偏距凸轮机构的dsdϕ−s线图如下图所示哈尔滨工业大学课程设计说明书由图中范围选定点(-10,-50)为凸轮转轴O点,则r0=√502+102=50.99mm取基圆半径为r0=51mm,偏距e=10mm。4、滚子半径的确定及凸轮理论廓线和实际廓线的绘制由程序计算得凸轮理论轮廓线最小曲率半径rmin=51mm.由滚子半径选择范围rr<ρmin−Δ,Δ=3~5mm得到滚子半径rr≤46mm.又因为凸轮整体尺寸较小,此范围明显过大,故适当减小滚子半径,这里取半径为rr=12mm.得到图线为:哈尔滨工业大学课程设计说明书附录1.求位移、速度、加速度的程序(matlab)functionf=tulunh=50;x1=150;t1=30;x2=100;t2=80;w=2*pi;x1=x1*pi/180;x2=x2*pi/180;t1=t1*pi/180;t2=t2*pi/180;%升程x=0:0.001:x1;s=h*(x/x1-sin(2*pi*x/x1)/(2*pi));v=h*w*(1-cos(2*pi*x/x1))/x1;a=2*pi*h*w*w*sin(2*pi*x/x1)/(x1*x1);subplot(3,1,1),plot(x,s),holdonsubplot(3,1,2),plot(x,v),holdonsubplot(3,1,3),plot(x,a),holdon%远休x=x1:0.001:x1+t1;s=h;v=0;a=0;subplot(3,1,1),plot(x,s),holdonsubplot(3,1,2),plot(x,v),holdon哈尔滨工业大学课程设计说明书subplot(3,1,3),plot(x,a),holdon%回程x=x1+t1:0.001:x1+t1+x2;s=h*(1+cos(pi*(x-(x1+t1))/x2))/2;v=-pi*h*w*sin(pi*(x-(x1+t1))/x2)/(2*x2);a=-pi*pi*h*w*w*cos(pi*(x-(x1+t1))/x2)/(2*x2*x2);subplot(3,1,1),plot(x,s),holdonsubplot(3,1,2),plot(x,v),holdonsubplot(3,1,3),plot(x,a),holdon%近休x=x1+t1+x2:0.001:x1+x2+t1+t2;s=0;v=0;a=0;subplot(3,1,1),plot(x,s),xlabel('φ/rad'),ylabel('S/mm'),title('位移-转角图线'),holdonsubplot(3,1,2),plot(x,v),xlabel('φ/rad'),ylabel('v/(mm/s)'),title('速度-转角图线'),holdonsubplot(3,1,3),plot(x,a),xlabel(φ/rad'),ylabel('a/(mm/s^2)'),title('加速度-转角图线'),holdon2.绘制凸轮机构dsdϕ−s线图functionf=jiyuan;x1=150;t1=30;x2=100;t2=80;h=50;x1=x1*pi/180;x2=x2*pi/180;t1=t1*pi/180;t2=t2*pi/180;x=0:0.001:150*pi/180;%升程v/ws=h*(x/x1-sin(2*pi*x/x1)/(2*pi));k=-h*(1-cos(2*pi*x/x1))/x1;plot(k,s,'r'),holdon;x=180*pi/180:0.001:280*pi/180;%回程v/ws=h*(1+cos(pi*(x-(x1+t1))/x2))/2;k=pi*h*sin(pi*(x-(x1+t1))/x2)/(2*x2);plot(k,s,'g'),holdon;%回程切线fori=-11:1:-11;f=@(k)k*tan(pi/6)+i;k=-40:0.1:50;s=f(k);plot(k,s),holdon;end%升程切线fori=-45:0.2:-45;f=@(k)-k*tan(60*pi/180)+i;哈尔滨工业大学课程设计说明书k=-40:0.1:50;s...