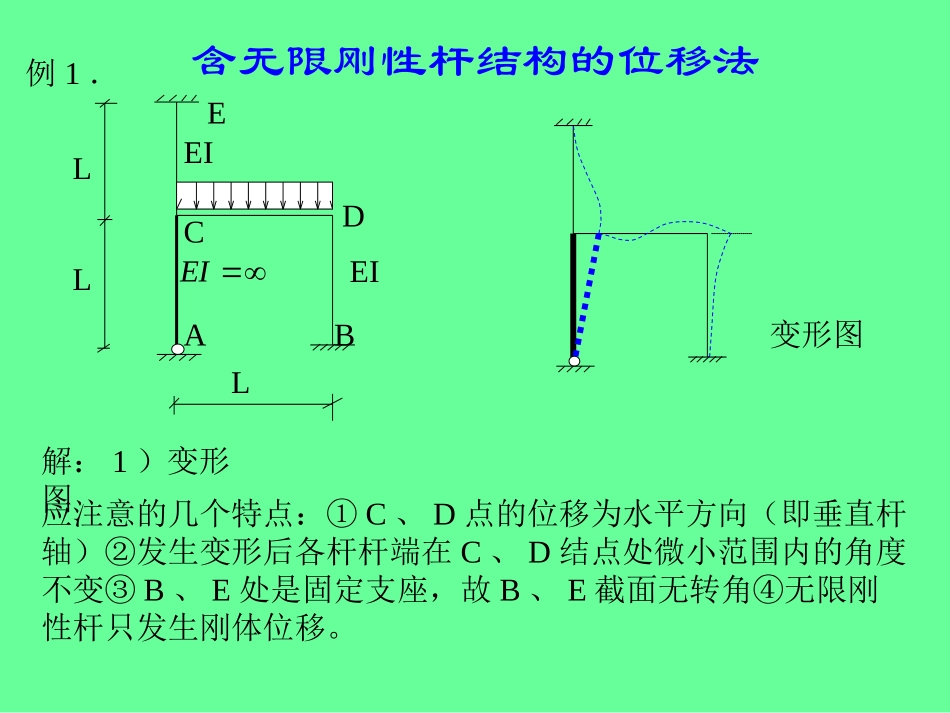
含无限刚性杆结构的位移法例1.ABCDELLLEIEIEI变形图解:1)变形图应注意的几个特点:①C、D点的位移为水平方向(即垂直杆轴)②发生变形后各杆杆端在C、D结点处微小范围内的角度不变③B、E处是固定支座,故B、E截面无转角④无限刚性杆只发生刚体位移
含无限刚性杆结构的位移法2)位移法变量:θD,ΔDH变形图DABC结点C虽然是刚结点,但与无限刚性杆CA连接,CA杆只发生侧移
CA杆的弦转角就是结点C的转角
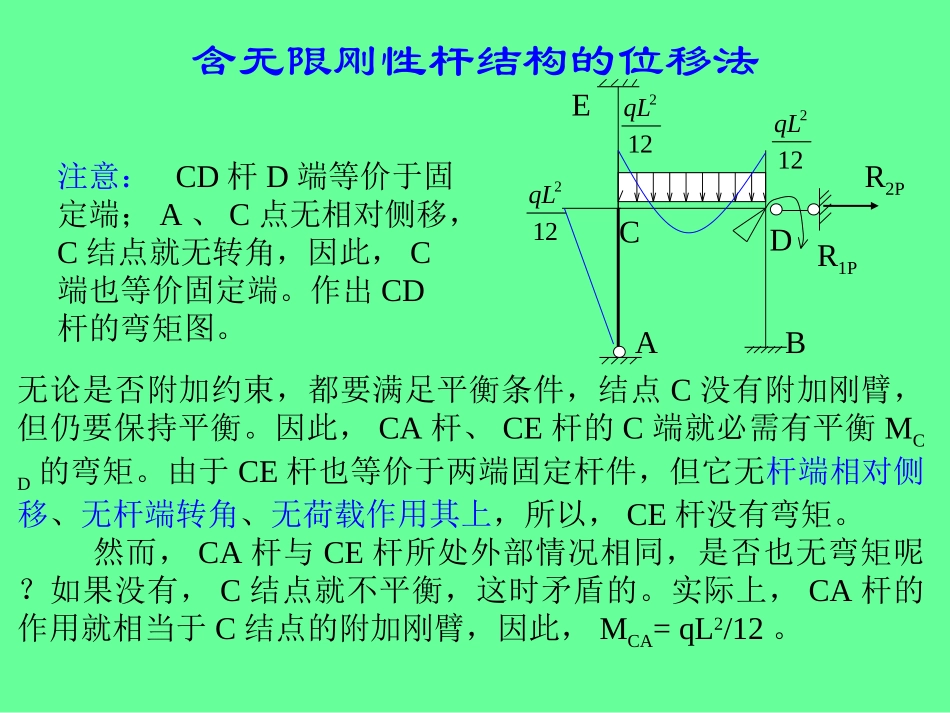
即有关系LDHC3)附加约束,作MP图并求R1P,R2P122qL122qL122qLR1PR2P含无限刚性杆结构的位移法注意:CD杆D端等价于固定端;A、C点无相对侧移,C结点就无转角,因此,C端也等价固定端
作出CD杆的弯矩图
无论是否附加约束,都要满足平衡条件,结点C没有附加刚臂,但仍要保持平衡
因此,CA杆、CE杆的C端就必需有平衡MCD的弯矩
由于CE杆也等价于两端固定杆件,但它无杆端相对侧移、无杆端转角、无荷载作用其上,所以,CE杆没有弯矩
然而,CA杆与CE杆所处外部情况相同,是否也无弯矩呢
如果没有,C结点就不平衡,这时矛盾的
实际上,CA杆的作用就相当于C结点的附加刚臂,因此,MCA=qL2/12
122qL122qL122qLR1PR2PCDAEB含无限刚性杆结构的位移法122qL122qL122qLR1PR2PCDAEBR1PqL2/120D求R1P的研究对象VDBVCAVCER2P求R2P的研究对象R1P=qL2/12R2P=-qL/12含无限刚性杆结构的位移法r114i4i求r11的研究对象VCAVDBVCEr21=-4i/L求r21的研究对象ijrMM图,求图与作21)
4r114i4i2i2i2ir211M附加支杆后D结点转动的变形图r11D含无限刚性杆结构的位移法1r22附加刚臂后D结点水平移动的变形图2M6i/L