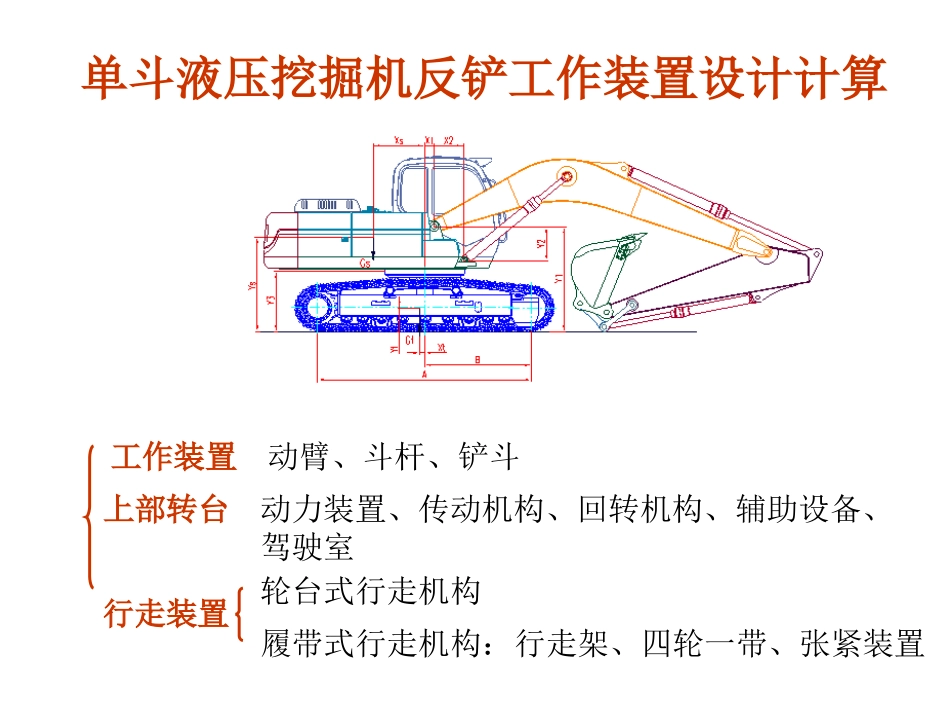
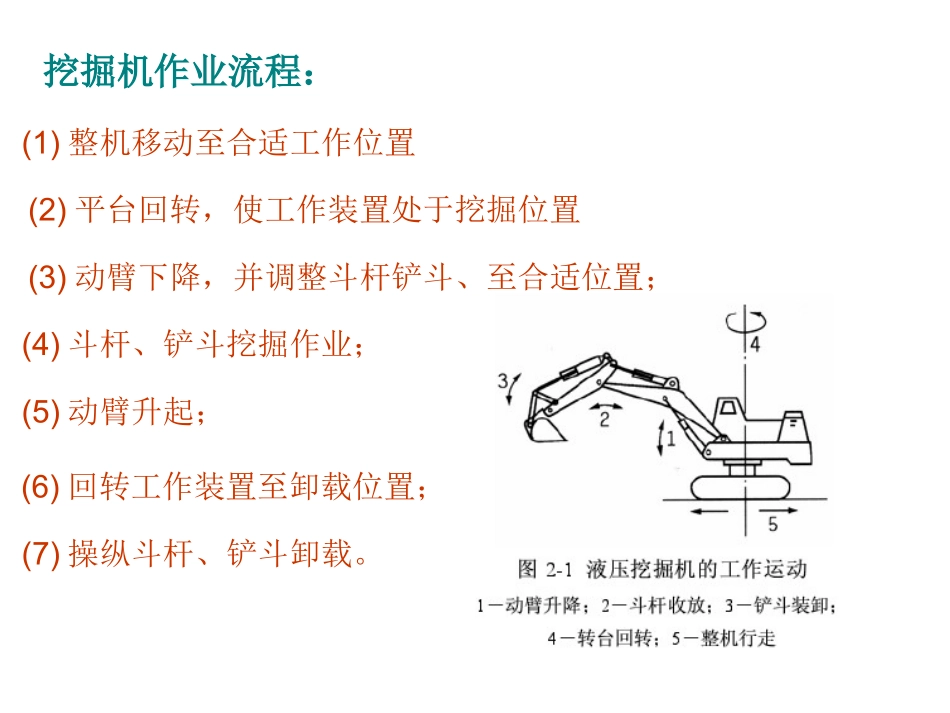
单斗液压挖掘机反铲工作装置设计计算工作装置上部转台行走装置动臂、斗杆、铲斗动力装置、传动机构、回转机构、辅助设备、驾驶室轮台式行走机构履带式行走机构:行走架、四轮一带、张紧装置挖掘机作业流程:(1)整机移动至合适工作位置(2)平台回转,使工作装置处于挖掘位置(3)动臂下降,并调整斗杆铲斗、至合适位置;(4)斗杆、铲斗挖掘作业;(5)动臂升起;(6)回转工作装置至卸载位置;(7)操纵斗杆、铲斗卸载
一、动臂整体式动臂:组合式动臂:结构简单、价廉,重量轻,但挖掘曲线单一
工作尺寸和挖掘力可以根据作业条件的变化进行调整;较合理地满足各类型作业装置的参数和结构要求;装车运输比较方便
动臂液压缸的布置动臂液压缸装于动臂的下前方动臂液压缸装于动臂的上方或后方,称为“悬挂式液压缸”动臂的结构型式为统一缸径和保证液压缸的闭锁能力,经常采用双动臂液压缸二、斗杆斗杆结构型式整体式动臂:组合式动臂:可通过更换斗杆或设置2~4个铰接孔来改变长度不常用斗杆液压缸的布置三、铲斗与铲斗液压缸的连接方式直接连接方式:铲斗、斗杆与组成四连杆机构六连杆方式:铲斗液压缸通过摇杆1与连杆2与铲斗相连六连杆方式二:活塞杆端接于摇杆两端之间(有更大的铲斗转角,但其平均挖掘力较小)得到较大的铲斗转角,改善机构的传动特性四、整机作业范围1
斗齿尖的坐标方程斗齿尖的坐标值是三组液压缸长度L1、L2、L3的函数
特殊工作尺寸当下置式动臂液压缸全缩或悬挂式动臂液压缸全伸,FQV三点共线并处于垂直状态时有最大挖深
最大挖掘深度最大卸载高度当下置式动臂液压缸全伸或悬挂式动臂液压缸全缩,斗杆液压缸全缩,QV连线处于垂直状态时有最大卸载高度
最大挖掘半径斗杆液压缸全缩,铲斗液压缸全缩,CV水平时有最大挖掘半径
停机面最大挖掘半径当斗杆液压缸、铲斗液压缸处于最大半径状态而铲斗斗齿尖V靠在停机面上时得到停机平面最大挖掘半径