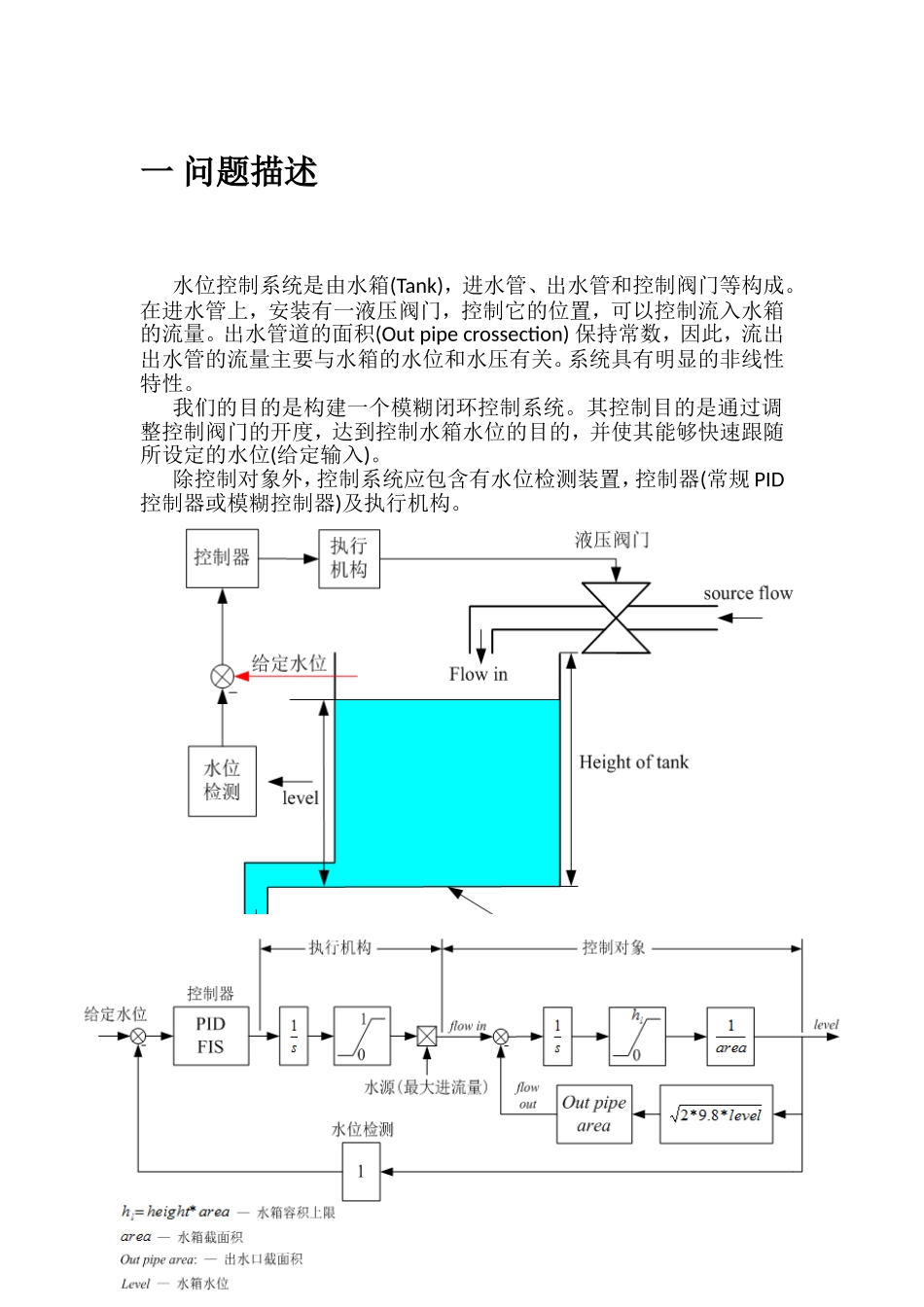
一问题描述水位控制系统是由水箱(Tank),进水管、出水管和控制阀门等构成
在进水管上,安装有一液压阀门,控制它的位置,可以控制流入水箱的流量
出水管道的面积(Outpipecrossection)保持常数,因此,流出出水管的流量主要与水箱的水位和水压有关
系统具有明显的非线性特性
我们的目的是构建一个模糊闭环控制系统
其控制目的是通过调整控制阀门的开度,达到控制水箱水位的目的,并使其能够快速跟随所设定的水位(给定输入)
除控制对象外,控制系统应包含有水位检测装置,控制器(常规PID控制器或模糊控制器)及执行机构
二控制系统动态结构图流速计算依据为简化伯努利方程或托里拆利定律,二者结论一致
其中托里拆利定律内容为:忽略粘滞性,任何液体止点从小孔中流出的速度与它从h高度处自由落下的速度相等
动态模型中主要用到的计算关系式如下:被控对象水箱模型搭建按照上述动态结构图进行,实际设计的水箱模型如下:Levelflowout液位=容积/底面积level=tankvolume/area流量=流速*出水口面积流速=(2*g*level)^0
5封装后执行机构:VALVE三水位控制系统模型四模型使用方法启动matlab,命令行输入sltank,既可打开水位模糊控制仿真模型
设置const大于等于0,系统工作于PID控制模式设置const小于0,系统工作于模糊控制模式模糊控制模式模糊控制时液位输入输出关系(双击Comparison示波器)液位动画PID控制模式PID控制时液位的输入输出关系比较两种控制模式下液位曲线可以发现PID控制有超调,这一点在液位动画中也有体现
修改模型参数PID参数的调整可以直接双击PIDController模块设置,这里着重介绍模糊控制器参数的修改
用到的主要命令如下:函数名功能说明fuzzy打开模糊推理系统GUI,fuzzyname打开name的fis系统