1、当您付费下载文档后,您只拥有了使用权限,并不意味着购买了版权,文档只能用于自身使用,不得用于其他商业用途(如 [转卖]进行直接盈利或[编辑后售卖]进行间接盈利)。2、本站所有内容均由合作方或网友上传,本站不对文档的完整性、权威性及其观点立场正确性做任何保证或承诺!文档内容仅供研究参考,付费前请自行鉴别。3、如文档内容存在违规,或者侵犯商业秘密、侵犯著作权等,请点击“违规举报”。
碎片内容
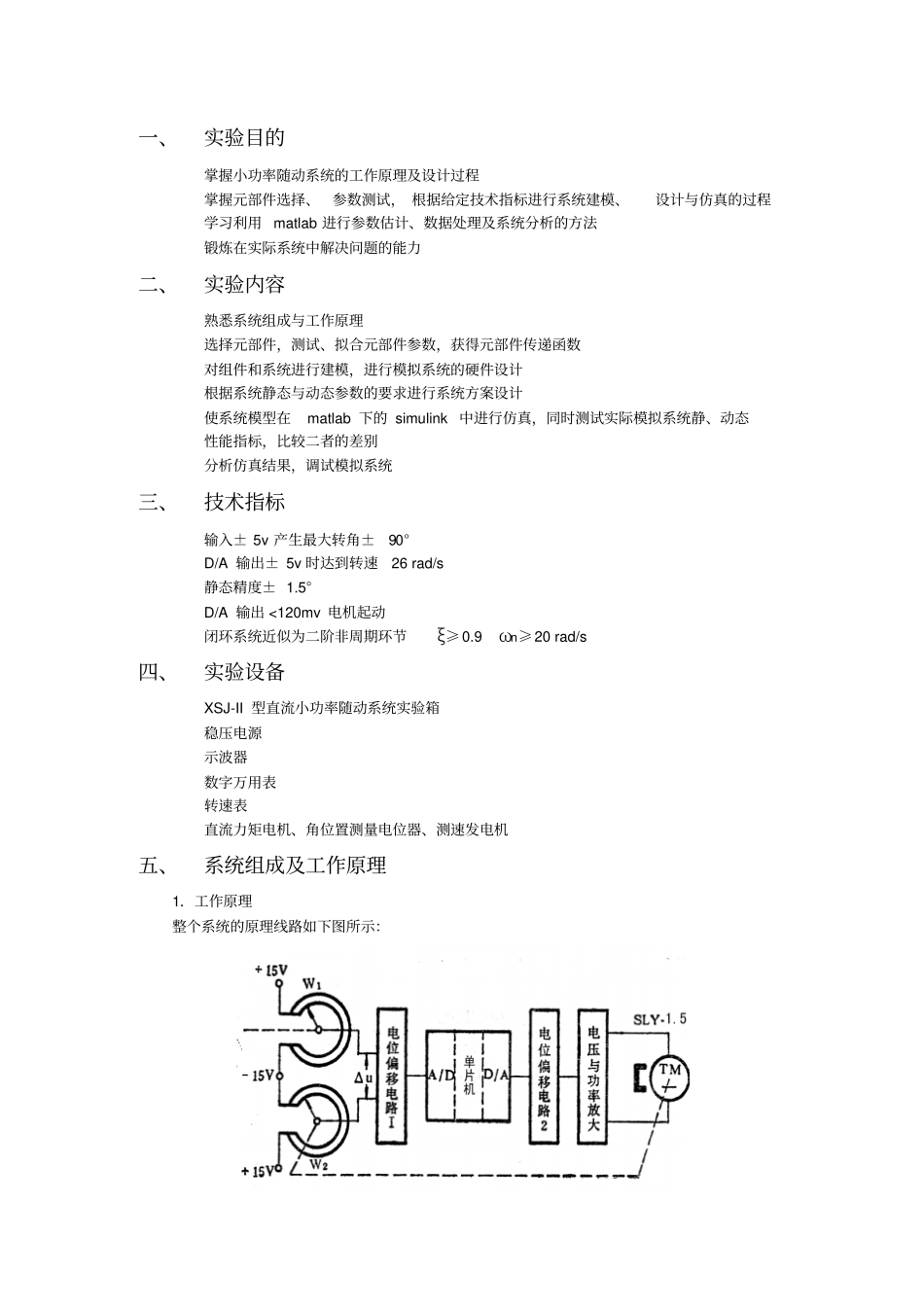
一、实验目的掌握小功率随动系统的工作原理及设计过程掌握元部件选择、参数测试,根据给定技术指标进行系统建模、设计与仿真的过程学习利用matlab进行参数估计、数据处理及系统分析的方法锻炼在实际系统中解决问题的能力二、实验内容熟悉系统组成与工作原理选择元部件,测试、拟合元部件参数,获得元部件传递函数对组件和系统进行建模,进行模拟系统的硬件设计根据系统静态与动态参数的要求进行系统方案设计使系统模型在matlab下的simulink中进行仿真,同时测试实际模拟系统静、动态性能指标,比较二者的差别分析仿真结果,调试模拟系统三、技术指标输入±5v产生最大转角±90°D/A输出±5v时达到转速26rad/s静态精度±1
5°D/A输出
该用户很懒,什么也没介绍