2DDDDDDDDDDDDDD2
1DDDDDD动态平衡原理即为自平衡独轮车的工作原理
通过运动补偿算法,运用加速度传感器和陀螺仪对车体姿态测试,同时借助精密的伺服控制系统高敏地对电机进行驱动,并作适度的调节,从而使整个车体的平衡性以及稳定性得到确保
由图能够得出,自平衡独轮车的车体摆动和它的转动是存在一定分离性的,驾驶人员的两腿将车身的两端夹紧,进而和车体产生了一个整体
一旦其身体倾向后方,那么驱动车轮就会朝后转,从而防止车体倒向后方;反之,若是朝前,那么车轮就会朝钱转;若其身体处于竖直状态,那么则独轮车也就表现为动态平衡
独轮车控制系统的重中之重就是平衡控制
就自平衡独轮车加以建模并做深度分析,便能够对系统的特性产生更多的了解,这对于相应控制算法的设计规划甚为有益
2DDDDD2
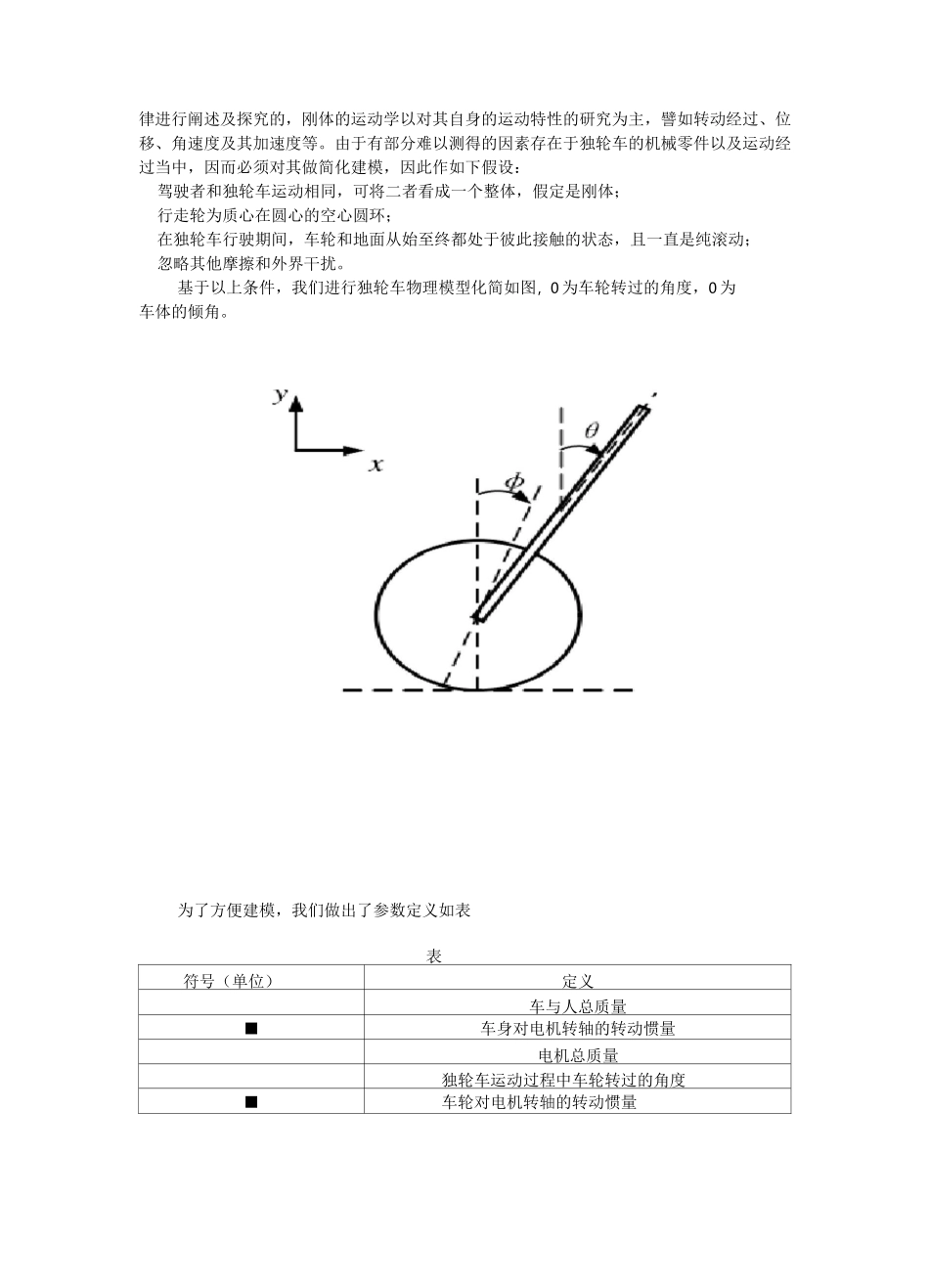
1□□□□□□自平衡独轮车不是平面机构,需要采用空间坐标的方式对其进行分析,坐标定义可详见图2
2,能够看出其自由度共有6个,其中平移、旋转各为3个
俯仰角屮、横滚角Y、偏航角①均为其旋转姿态角
因为独轮车的左右方向以驾驶者自身的调节为主,只能够控制前方和后方,故而把模型简单化至xoz平面,仅对这两个方向上的平衡控制进行探讨
2运动学是力学的一个分支,主要是站在几何的视角上来对物体位置伴随时间的波动规律进行阐述及探究的,刚体的运动学以对其自身的运动特性的研究为主,譬如转动经过、位移、角速度及其加速度等
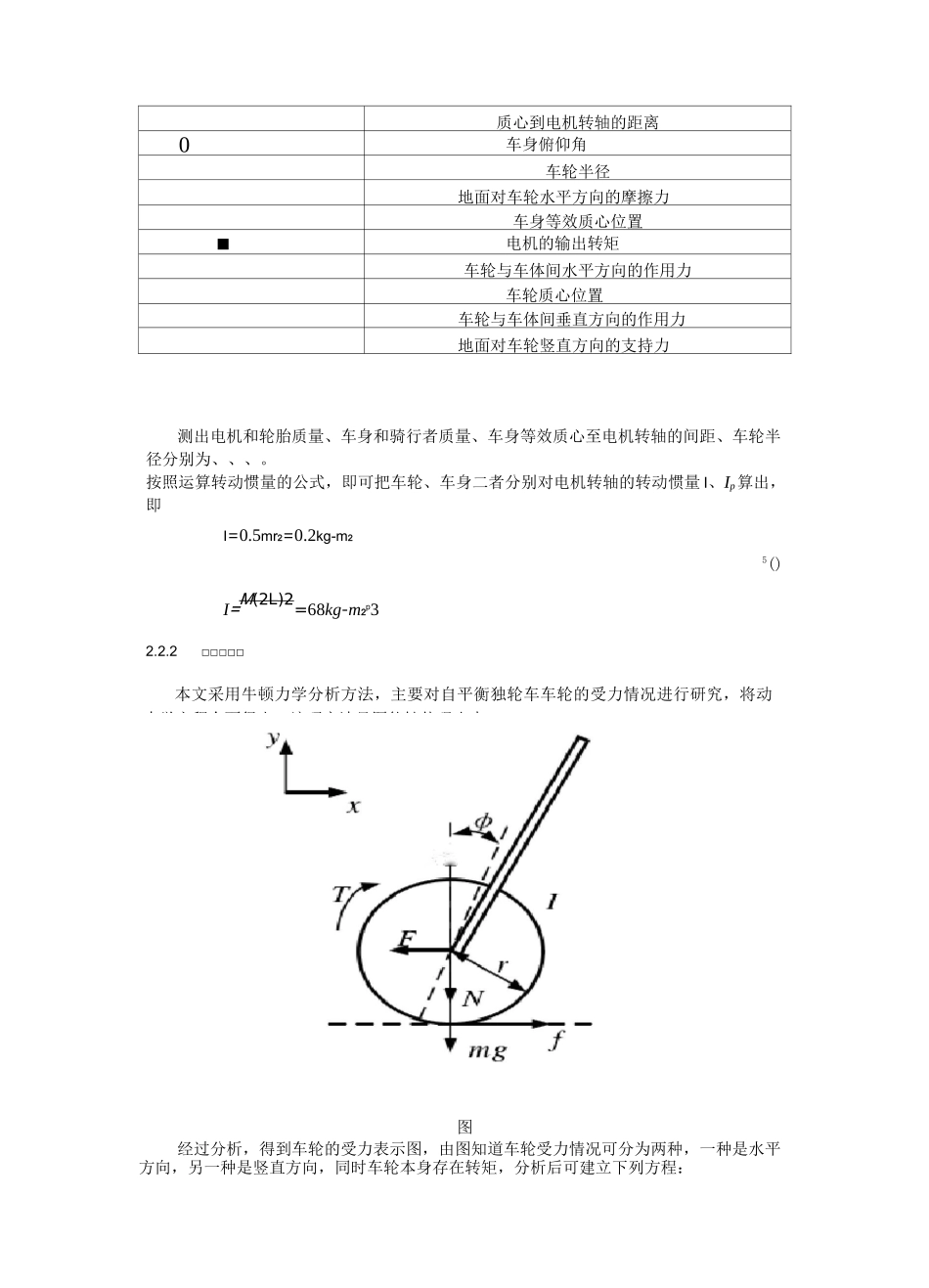
由于有部分难以测得的因素存在于独轮车的机械零件以及运动经过当中,因而必须对其做简化建模,因此作如下假设:驾驶者和独轮车运动相同,可将二者看成一个整体,假定是刚体;行走轮为质心在圆心的空心圆环;在独轮车行驶期间,车轮和地面从始至终都处于彼此接触的状态,且一直是纯滚动;忽略其他摩擦和外界干扰
基于以上条件,我们进行独轮车物理模型化简如图,0为车轮转过的角度,0为车体的倾角