第一部分从RCNN开始介绍基于候选区域的目标检测器,包括FastR-CNN、FasterR-CNN和FPN等
第二部分则重点讨论了包括YOLO、SSD和RetinaNet等在内的单次检测器
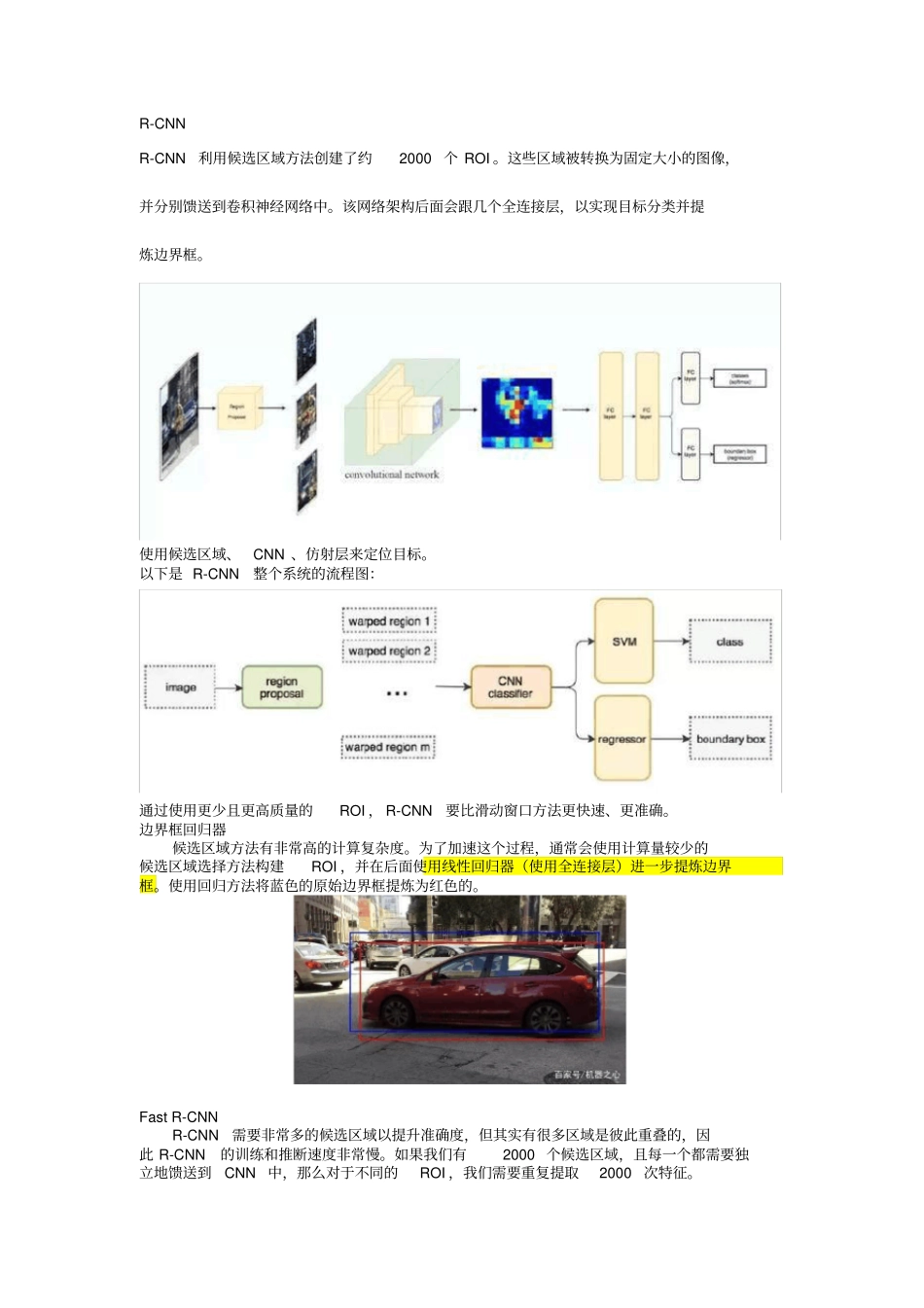
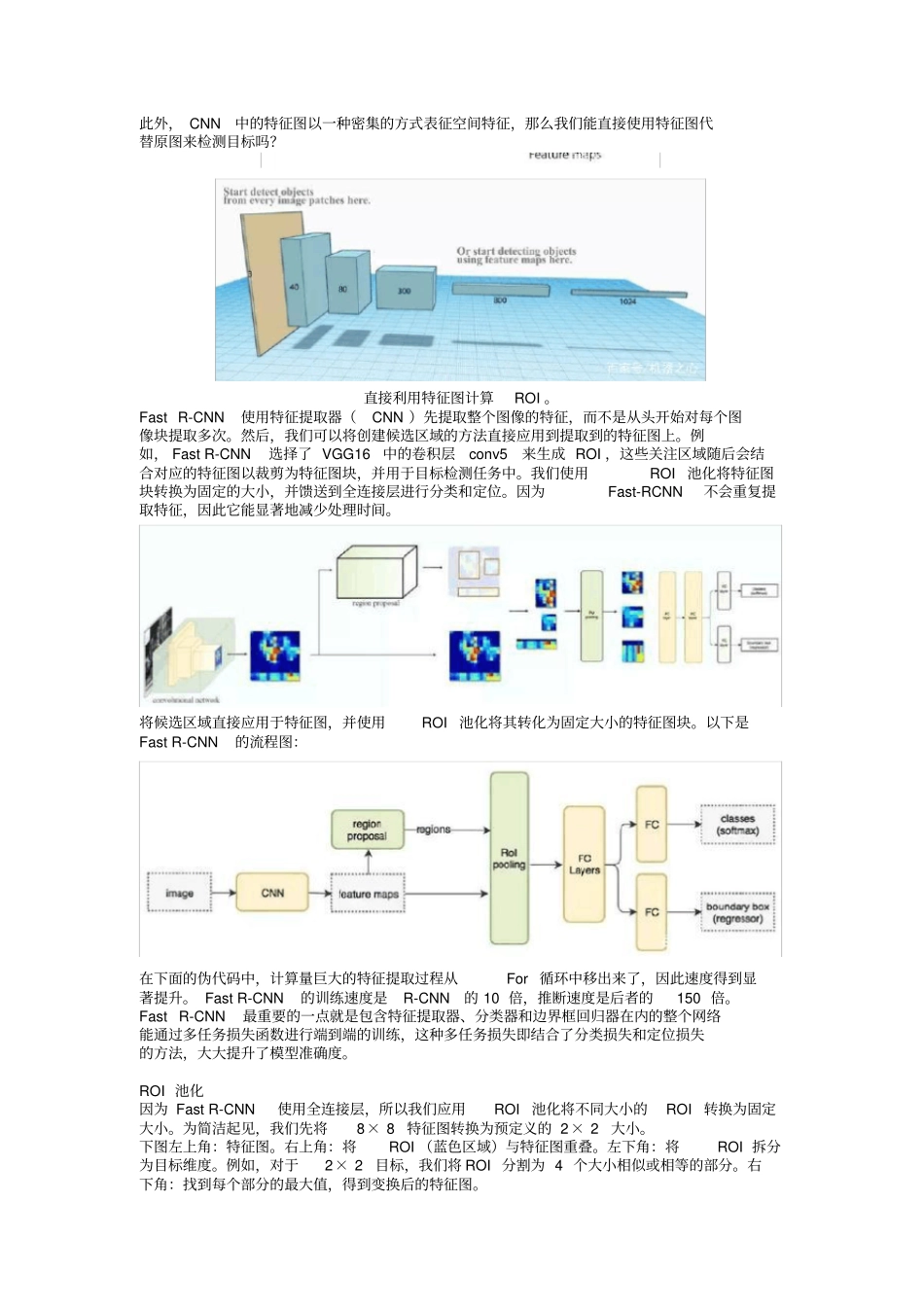
深度学习目标检测模型全面综述:FasterR-CNN、R-FCN和SSD从零开始PyTorch项目:YOLOv3目标检测实现像玩乐高一样拆解FasterR-CNN:详解目标检测的实现过程后RCNN时代的物体检测及实例分割进展物体检测算法全概述:从传统检测方法到深度神经网络框架基于候选区域的目标检测器滑动窗口检测器一种用于目标检测的暴力方法是从左到右、从上到下滑动窗口,利用分类识别目标
为了在不同观察距离处检测不同的目标类型,我们使用不同大小和宽高比的窗口
滑动窗口(从右到左,从上到下)根据滑动窗口从图像中剪切图像块
由于很多分类器只取固定大小的图像,因此这些图像块是经过变形转换的
但是,这不影响分类准确率,因为分类器可以处理变形后的图像
将图像变形转换成固定大小的图像
变形图像块被输入CNN分类器中,提取出4096个特征
之后,我们使用SVM分类器识别类别和该边界框的另一个线性回归器
滑动窗口检测器的系统工作流程图
我们创建很多窗口来检测不同位置的不同目标
要提升性能,一个简单的办法就是减少窗口数量
选择性搜索用候选区域方法(regionproposalmethod)创建目标检测的感兴趣区域(ROI)
在选择性搜索(selectivesearch,SS)中,首先将每个像素作为一组
然后,计算每一组的纹理,并将两个最接近的组结合起来
但是为了避免单个区域吞噬其他区域,我们首先对较小的组进行分组
我们继续合并区域,直到所有区域都结合在一起
下图第一行展示了如何使区域增长,第二行中的蓝色矩形代表合并过程中所有可能的ROI
(作者为了保证能够划分的完全,对于相似度,作者提出了可以多样化的思路,不