第二章机械结构和机械零件2
1机械机构一、机构的定义1)机构是有确定相对运动的构件组合体;2)机构是机械系统的组成单元
二、机构的分类机构能传递、转换运动或实现某种特定的运动,不同的机构间有不同的相对运动,形成不同的变换功能
常用的机构有:连杆机构、凸轮机构、齿轮机构、带传动机构、链传动机构、螺旋机构、步进机构等
(一)连杆机构连杆是联接两个及两个以上运动副(转动或移动副)的构件
用运动副按顺序把几个构件联接起来则组成连杆机构(connectingrodgear)
其作用是传递动力和完成一定规律的运动
连杆机构可分为平面连杆机构和空间连杆机构
1、平面连杆机构平面连杆机构(planarlinkage)是由若干个互相作平面运动的刚性构件用2
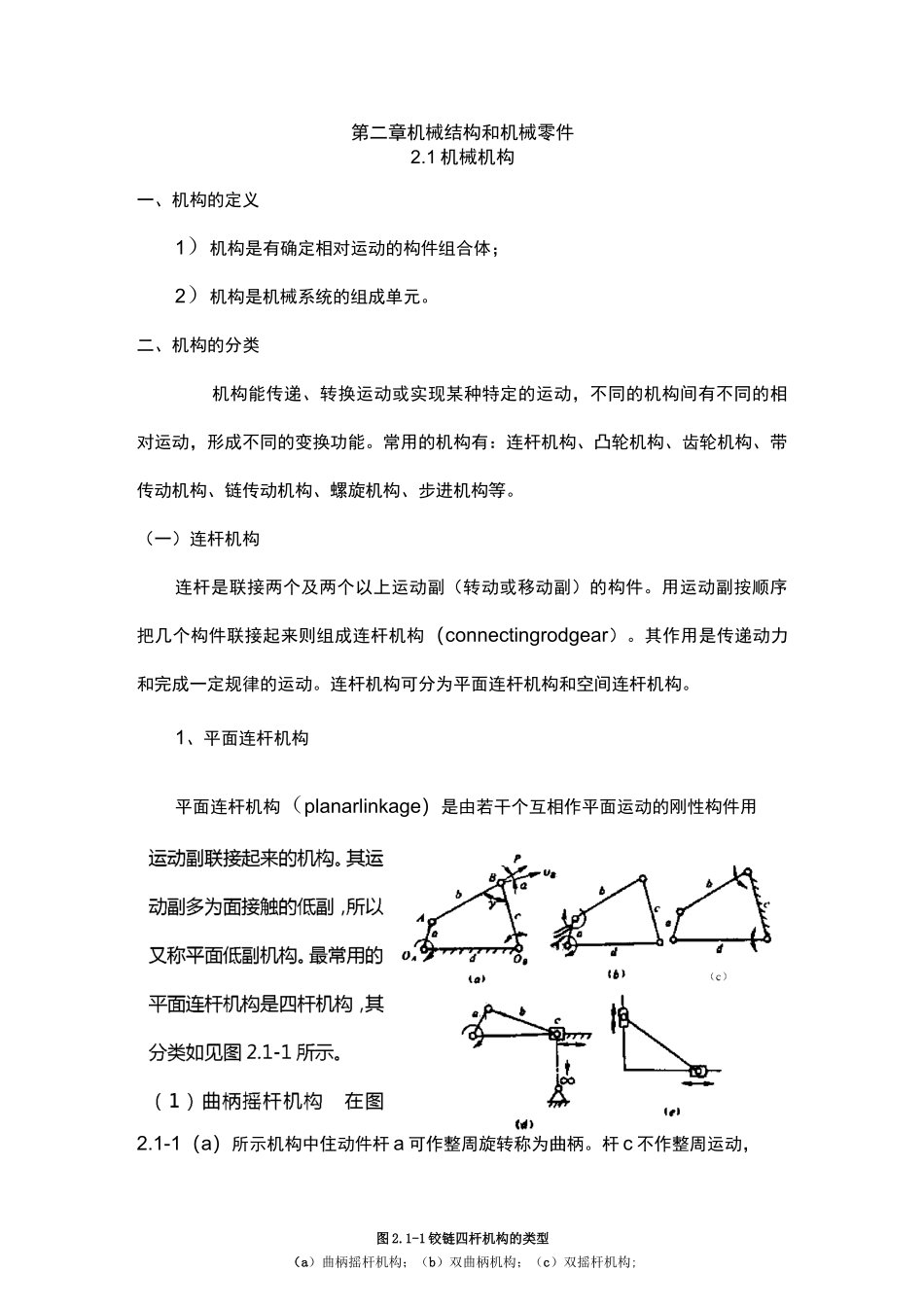
1-1(a)所示机构中住动件杆a可作整周旋转称为曲柄
杆c不作整周运动,图2
1-1铰链四杆机构的类型(a)曲柄摇杆机构;(b)双曲柄机构;(c)双摇杆机构;(d)曲柄滑块机构;(e)双滑块机构只按某一角度往复转动称为摇杆
设a、b、c、d既是各杆的符号,又代表各杆的长度
当满足最短杆和最长杆之和小于或等于其他两杆长度之和时,若将最短杆或其邻杆固定其一,则另一杆即为曲柄
这就是四杆机构有曲柄的条件
在满足曲柄存在的条件下,铰接四杆取不同的构件为机架(固定件),即可得到不同特性的机构
(2)双曲柄机构如图2
1-1(b)中,取a为机架,则b和d均为曲柄,成为双曲柄机构
如其中两曲柄长度相等,连杆与机架长度也相等,则成为平行四边形机构
它在机器中应用很广,如机车车轮的联动机构等
(3)双摇杆机构在图2
1-1(c)中,取c为机架,若不满足曲柄存在的条件,则两连架杆b、d均为摇杆,故称双摇杆机构
它应用也很广泛,如鹤式起重机、飞机起落架等
在双摇杆机构中,若两摇杆长度相等,则成为等腰梯形机构,在汽车、轮式拖拉机中常用这种机构操纵前轮的转向