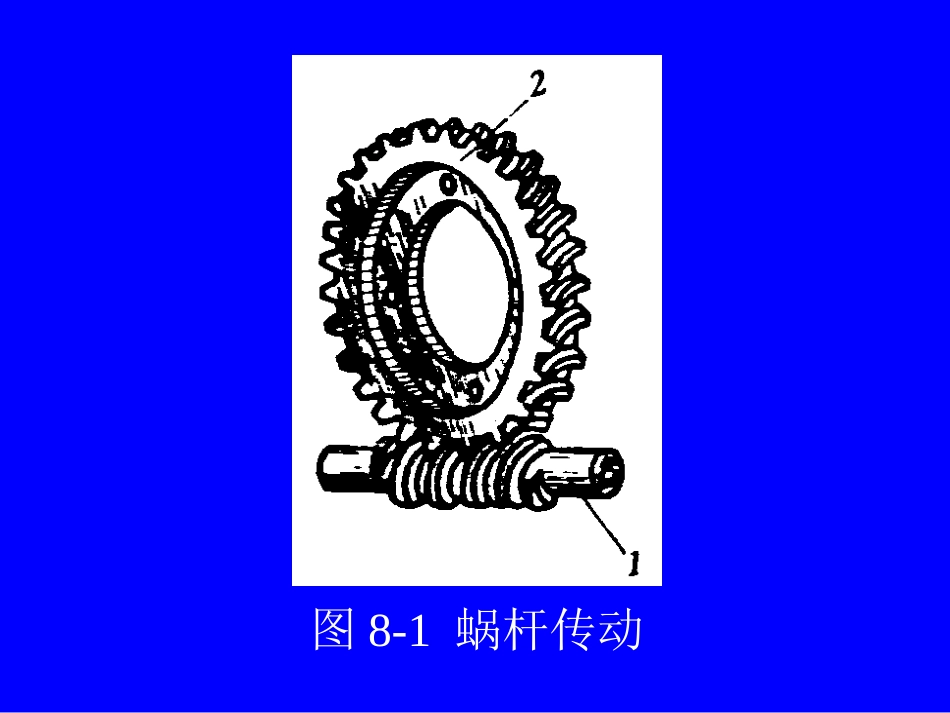
第八章蜗杆传动蜗杆传动主要由蜗杆1和蜗轮2组成(图8-1),蜗杆传动用于传递空间交错成90的两轴之间的运动和动力,通常蜗杆为主动件
与其他机械传动比较,蜗杆传动具有传动比大、结构紧凑、运转平稳、噪声较小等优点,因此广泛应用于各种机器和仪器中
图8-1蜗杆传动机械中常用的为普通圆柱蜗杆传动
本章主要讨论这种蜗杆传动
蜗杆传动有:环面蜗杆传动、锥蜗杆传动、圆弧圆柱蜗杆传动等
根据蜗杆螺旋面的形状,可分为阿基米德蜗杆、渐开线蜗杆及延伸渐开线蜗杆等三种
由于阿基米德蜗杆容易加工制造,应用最广,其他蜗杆还有:锥面包络圆柱蜗杆、法向直廓蜗杆等
如图8-2所示,通过蜗杆轴线并与蜗轮轴线垂直的平面,称为中间平面
§8-1蜗杆传动的正确啮合条件图8-2蜗杆传动的中间平面中间平面内阿基米德蜗杆具有渐开线齿条齿廓,侧边夹角为2,蜗轮齿廓也是渐开线
所以在中间平面内蜗轮与蜗杆的啮合传动相当于渐开线齿条与齿轮啮合传动
因此蜗杆传动的几何尺寸计算与齿条齿轮传动相似
从而可得蜗杆传动的正确啮合条件为:(1)在中间平面内,蜗杆的轴向模数ma1与蜗轮的端面模数mt2必须相等
(2)蜗杆的轴向压力角a1与蜗轮的端面压力角t2必须相等
(3)两轴线交错角为90时,蜗杆分度圆柱上的导程角应等于蜗轮分度圆柱上的螺旋角,且两者的旋向相同
为了方便加工,规定蜗杆的轴向模数为标准模数
蜗轮的端面模数等于蜗杆的轴向模数,因此蜗轮端面模数也应为标准模数
标准模数系列见表8-1
压力角标准值为20
§8-2普通圆柱蜗杆传动的主要参数和几何尺寸计算一、模数m和压力角选择蜗杆头数z1时,主要考虑传动比、效率及加工等因素
通常蜗杆头数z1=1、2、4
若要得到大的传动比且要求自锁时,可取z1=1;当传递功率较大时,为提高传动效率,可采用多头蜗杆,通常取z1=2或4
二、蜗杆头数z1、蜗轮齿数z2和传动比i蜗轮齿数z